

不要盲目相信机器。
停在前面的并不是一辆真车,是一辆「气球车」,这是人们给 AEB(自动紧急制动功能)测试道具起的昵称。
虽然整体上看来就是一个伪装成汽车后部的充气方块,但是在其中却另有乾坤。在它内部中间位置有一个三角锥,上下各有一片铝板,甚至外面包裹的材料也有要求:它们必须是吸波材料,这样才能确保后方的汽车可以把它识别为「一辆车」,而不是挂在气球车前方的一块铁板。
 可被车辆识别的「气球车」 | 现场拍摄
可被车辆识别的「气球车」 | 现场拍摄当极客公园(ID:geekpark)乘坐的奇瑞瑞虎 8 以 40km/h 的速度向前行驶时,距离气球车还有约 2 米的时候,车辆内部发出「嘀嘀嘀」的警报声,并且采取了紧急制动措施,最终在距离气球车约 50cm 时停下来。

车对车的 AEB 完整测试过程就是这样。作为 L2 级别自动辅助驾驶系统当中非常重要的一项功能,因为它能保证主动安全性,在符合条件的情况下,司机面对危机状况并未采取任何措施,机器可自主做出应急举动。也正因如此,AEB 甚至被一些人称为「辅助驾驶之光」。
AEB 到底能不能配得上这项称号呢?
AEB 的上级——PEBS
要问是不是,先看为什么。要说今天的主角 AEB,还要从 PEBS 谈起。
Predictive Emergency Braking System,预测性紧急制动(辅助)系统,简称 PEBS,属于 L2 级别自动辅助驾驶系统的主动安全系统。你可以把它看作各个安全功能的集合,包括 PCW(预测性碰撞报警)、AEB(自动紧急制动),以及 EBA(紧急制动辅助)。
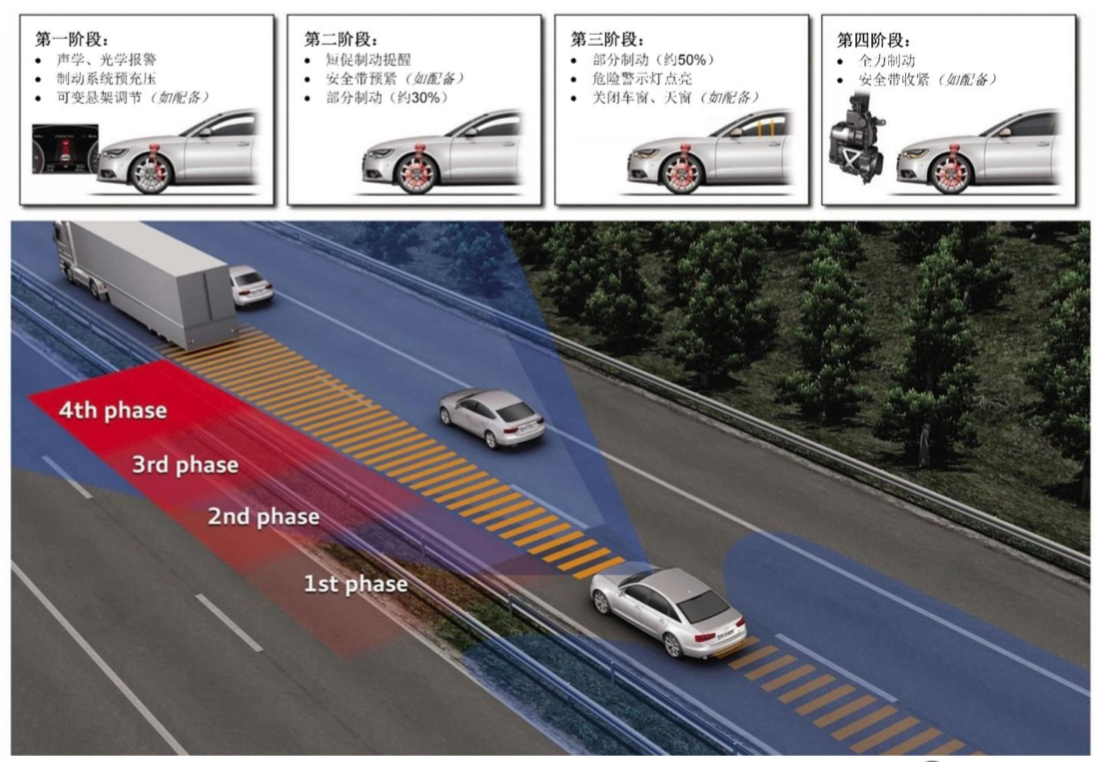
当车辆有潜在危险的可能时,就是 PEBS 放开手脚的时候。不过,对于「潜在危险」的判断标准,则要由机器自己来判断。以 L2 级别自动辅助驾驶系统供应商博世的说法,机器判断潜在危险大致有 4 个阶段,比如距离相对较远速度却比较快的时候,车辆会发出声音警告,同时制动系统预充压;当与前车距离较近,随时可能撞上时,系统会自动采取紧急制动,如果配备安全带收紧功能也会使用。
当然,这只是大致的标准,在实际情况当中,机器的判断会因各种因素的不同而改变,如本车与前方车辆行驶的速度,司机是否采取相应措施等等,传感器可以自行判断需不需要,以及采取何种方式提醒驾驶员。
 、
、在设备方面,L2 级别自动辅助驾驶系统需要车辆前方的毫米波雷达与摄像头来实现预测性紧急制动功能。
毫米波雷达的工作原理也容易理解。简单来说,雷达会捕捉到目标物体的电磁波,将其处理为信号,再通过算法呈现为图,使机器描绘出物体的形状,方便之后进行各式各样的功能操作。
摄像头就更加容易理解,由于雷达收到的信息并不能完全帮助机器「认识」目标物体,而摄像头采集到图像之后,通过内置在摄像头中图像信息处理单元(ISP)对图像进行分析,从而实现对画面中的车辆及其灯光、行人、车道线等目标的探测。摄像头又分单目,双目等,现阶段,大多数 L2 级别自动辅助驾驶系统还是以毫米波雷达+单目摄像头的方式完成,这里不再赘述。
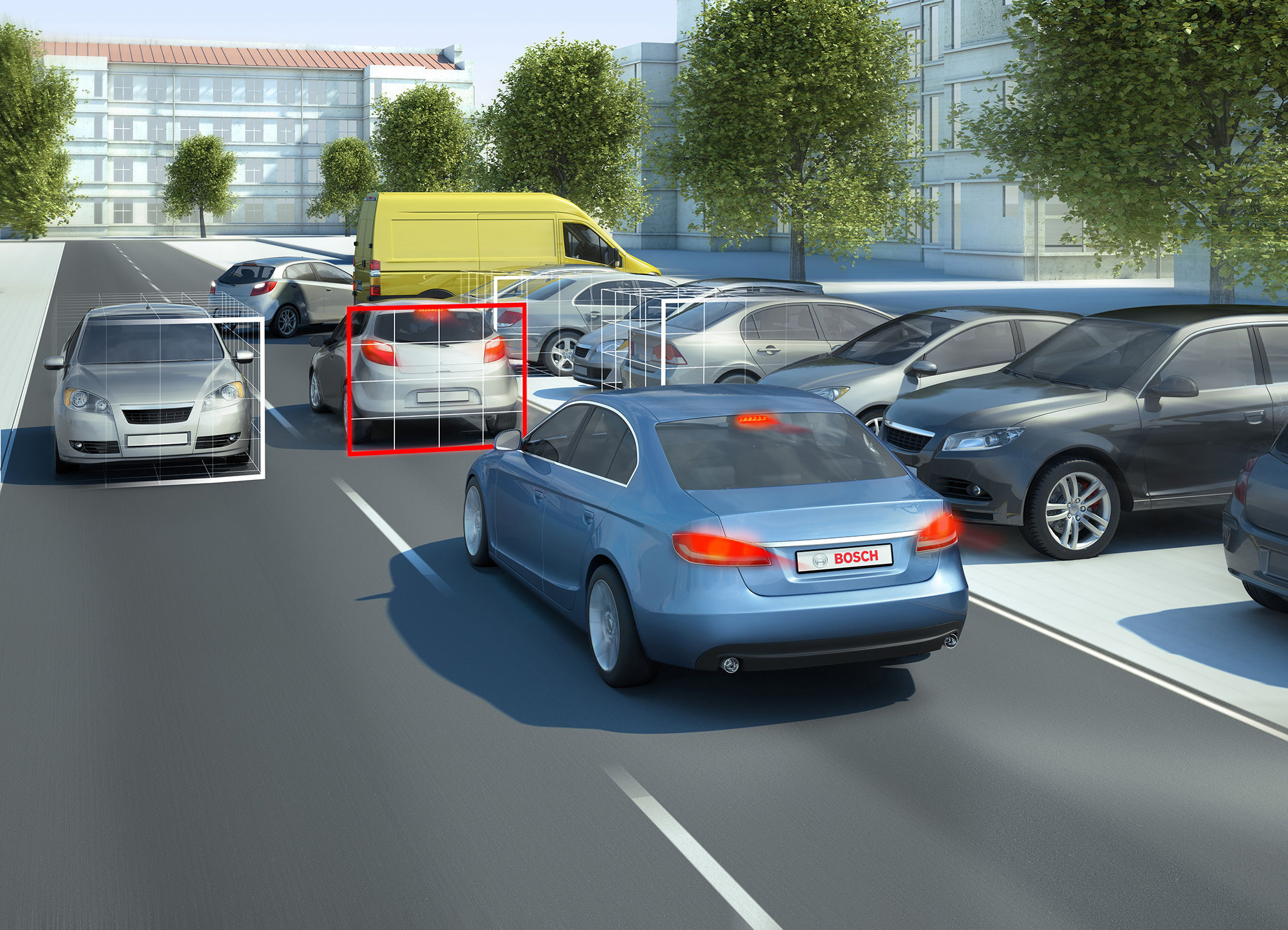
 通过车身的传感器与摄像头可以达到 L2 级别的自动辅助驾驶系统 | 博世
通过车身的传感器与摄像头可以达到 L2 级别的自动辅助驾驶系统 | 博世博世方面透露,其 L2 自动辅助驾驶系统也正在逐步搭载到整车。威马 EX5、名爵 ZS,吉利博瑞等车型均有搭载,2019 年,博世预计在中国落地 40 款车型,目前已有数十款车型搭载,具体数字博世方面则并未说明。
因为毫米波雷达与摄像头都具有独特的优劣势,二者需要互补,共同增加系统的安全系数,后面会分别详细讲解。值得说明的是,要把这两个性质完全不同的传感器组合在一起,可不是 1+1=2 这么简单的事。
什么是辅助驾驶的关键点?
与气球车测试不同的是,针对行人横穿的 AEB 功能测试看起来要更加复杂一些。
在低速驾驶的情况下(时速约 30km/h),汽车驾驶道上一个仿真人从车辆前方经过,同样,在即将撞上的时候车辆一个急刹,在行人经过时停稳,此时人与车之间的距离大约只有 20cm。
尽管距离非常近,车辆在 AEB 测试方面还是很好地完成了任务。如果说困难程度的话,前方行人的检测要比前方车辆的检测更考验辅助驾驶系统的反应能力。

为什么会是这样的结果?如果在真实的场景下,行人的安全还可以保证吗?
人类的体积比汽车要小很多,这是肉眼可见的事实。对于毫米波雷达的探测来讲,人类对雷达的反射强度也要弱许多。这就使毫米波雷达对前方行人的探测造成一定的困难。
博世底盘控制系统中国区驾驶员辅助系统业务单元工程部门经理杜宇告诉包括极客公园在内的媒体,毫米波雷达的优点在于对前方物体探测时,对于其在纵向方向上的相对速度、距离等属性探测非常精准。而摄像头在判断物体的特征,如是什么类型的物体上,有先天的优势,同时基于视觉的算法对于物体在横向方向上的位移判断又相对雷达来说更加精准。
通过双重判定,系统才可以确定前方的路况,进而决定用不用执行其他操作,这就是所谓的「数据融合」,辅助驾驶系统的关键点。在打造系统的时候,二者的数据融合基本上是必须考虑的事情。
 针对行人骑自行车的场景进行 AEB 功能测试 | 博世
针对行人骑自行车的场景进行 AEB 功能测试 | 博世就像上文说到的,这是个 1+1>2 的结果。更重要的是,数据融合会增加探测目标存在概率的可信度。数据融合将不同类型传感器所探测到同一个属性目标的存在概率进行叠加。尤其在某一种传感器受内部或外部因素影响,如摄像头受强光、极端天气等影响时,可避免因其而带来的系统性能降低,保证系统可靠的运行。
在 L2 级别自动辅助驾驶系统当中,数据融合的例子随处可见。如通过雷达与摄像头的融合,可以实现 L2 级别自动辅助驾驶的交通拥堵辅助及智能巡航辅助功能。通过引入更多的传感器(如四个角雷达)还可实现在驾驶员监控下的自动变道。
 驾驶员辅助系统当中,数据融合是关键点 | 博世
驾驶员辅助系统当中,数据融合是关键点 | 博世回到开头的话题,车对行人的 AEB 功能能不能避免车祸的发生?
答案是否定的。在国际最为严格的欧洲新车安全测试体系 Euro NCAP 当中明确给 AEB 功能下了定义:车辆在探测到极有可能发生碰撞时所自动施加的制动,用以降低车辆的速度并尽可能的避免碰撞的发生。
降低车辆速度,而不是让车辆停下来;「尽可能避免」,而不是完全避免。这些字眼都表明一件事,机器在目前的确无法替代人类。
测试现场的工作人员告诉极客公园,一般来说在检测到行人并触发 AEB 功能时,车辆将时速降低 40km/h 是比较符合标准的,假如车辆以 60km/ h 的速度行驶,触发 AEB 功能后短时间内降到 20km/h,就能算得上合格。
另外一点,即便是触发 AEB 功能,也需要一定的条件。
和电脑手机一样,如果我们要在设备上达到某种目的,就必须要触发那个达到目的的条件。在汽车上也一样,即便设备拥有人工智能,即便它的探测距离可以达到前方几百米,但 AEB 功能的触发条件也有着诸多限制。
 即便是主动安全功能,也存在许多限制 | 博世
即便是主动安全功能,也存在许多限制 | 博世现场的工作人员告诉极客公园,车辆在时速 4km/h 以上才可以开启 AEB 功能,如果在该时速之下,传感器的判断是不精准的,因此默认不开启;遭遇前方车辆紧急制动从而启动 AEB 功能后 2 秒钟,如果司机依然没有作为的话,车辆会重新启动进行怠速行驶,因为车辆静止后主动安全功能也就停止运行,不存在 AEB 功能;车辆需要在行驶平稳时 AEB 功能才大概率会开启,如果司机不断调整方向,或者行驶速度非常不均,机器就没有办法工作……类似的限制条件还有很多。
2019 年 9 月,美国汽车协会(AAA)针对 AEB 和行人检测警告两个功能进行了一系列测试。结果显示,这些号称可以检测到行人并自动刹车的系统,还远未达标。在低速驾驶的情况下(时速约 32km/h),四款搭载 L2 级别自动辅助驾驶系统的车辆仅有 40% 的概率可以避免碰撞,如果速度提高,或者把行人换成小孩,发生事故的概率大大增加。(详情可见极客公园之前的报道:直到今天,我们仍然无法信任辅助驾驶)

可想而知,认准仅仅拥有自动刹车辅助(AEB)的 L2 级别自动辅助驾驶系统的人们敢在道路上撒开方向盘,用一瓶水来蒙骗机器,是多么危险的事情。对于车企或者供应商来说,在保证安全的同时,也必须兼顾驾驶体验。而对于消费者,认清现实情况,是对个人安全最大的负责。
责任编辑:王训魁


