

不断的把积累的自动驾驶能力输出、开源,我们不禁在思考这样类似于「公益项目」的不断贡献,百度能得到的是什么?辛辛苦苦打造的「Apollo 计划」又是为了什么?
两个半月,新增 6 万 5 千行代码,但它们被公司完整的开源,输出给了开发者,这是公益项目?不。
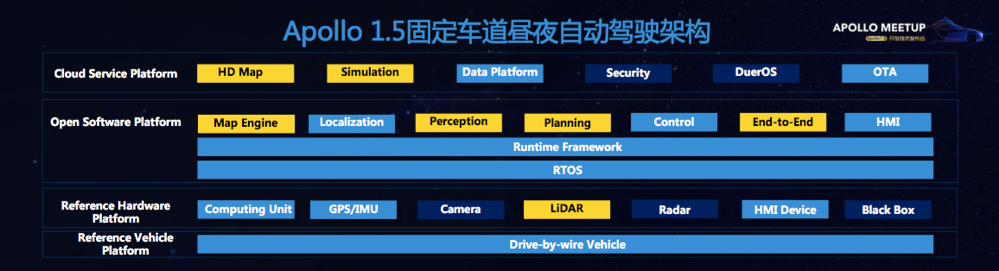
这家公司是百度,今天,百度的 Apollo 计划 1.5 版本按照开放路线图如期开放,其中包含障碍物感知、决策规划、云端仿真、高精地图服务、端到端的深度学习(End-to-End)等五大核心开放能力,并支持昼夜定车道自动驾驶。

简单来说,如果说 Apollo 1.0 为你带来的能力是可以依靠高精度地图和导航定位模块打造成「一辆封闭场地循迹自动驾驶汽车」,那么 Apollo 1.5 的更新则是帮助开发者和合作伙伴拥有更进一步的能力,打造「一辆拥有定车道昼夜自动驾驶能力的汽车」。
而这一切完全按照百度「阿波罗计划」的开放路线图在进行,阿波罗计划在这两个多月又得到了哪些进展?百度不断输出自己的能力造福「自动驾驶行业」,这一步步看似像公益一样的开源和能力输出究竟是为什么?
Apollo 1.5 究竟拥有什么?
Apollo 1.5 说开放了五大核心能力,可能不好理解,所以简单说,这些核心能力具备两大特点:一方面,即使在夜间恶劣的视觉环境下,也能实现精准障碍物识别,保障夜间安全行驶;另一方面,能够实现异形障碍物(非典型交通场景)识别,例如大型犬、足球、垃圾桶等。最后还为开发者及合作伙伴提供详细的开发文档、完善的调试工具、快速的实车验证。
官方也总结了 Apollo 1.5 的亮点:
- 最完善: 首次开放核心障碍物感知和决策规划模块,首次开放云端仿真服务。
- 最先进:开放 deep learning based 障碍物感知;开放多次迭代和多决策并行的决策规划架构,架构先进性。
- 易拓展:开放激光雷达云端标准,对开发者更友好;支持外部合作伙伴方案的感知和规划接口,更有扩展性。
所以高精度地图搭配云端仿真才是推动 Apollo 能力快速创新的核心,百度的高精度地图能力就不多说了,Apollo 开放了全球范围内高速与特定城市道路的高精地图服务合作。
云端仿真是 Apollo 开放平台的工具链,是让你的无人车实现「日行百万公里」测试的第一步,官方也自豪的定义这个「Apollo 云端仿真平台」是唯一开放的、内置高精地图的、为自动驾驶量身打造的仿真平台。
这次 Apollo1.5 开放的仿真数据包括:
- 仿真场景: 基于路型,包括十字路口、掉头、直行、弯道等。基于障碍物类型,包括行人、机动车、非机动车等。基于道路规划,包括直行、调头、弯道、转弯、并道等。基于红绿灯信号,包括红灯、黄灯、绿灯等。
- 算法上传与场景运行: 支持同时多场景的高速运行。支持单算法模块的上传运行,提供基于 Apollo 基本整车环境的单个模块的仿真结果。系统整套算法和运行环境的上传与运行。
- 智能判别系统:本期开放 5 个判别标准:碰撞检测、闯红绿灯检测、限速检测、在路检测、到达目的地检测。
- 算法 3D 可视化: 提供实时路况,包括当前车道、红绿灯、限速。算法模块输出的可视化信号,包括路径规划、动态障碍物、无人车规划轨迹等。无人车状态的全局信息,包括速度、刹车油门状态。
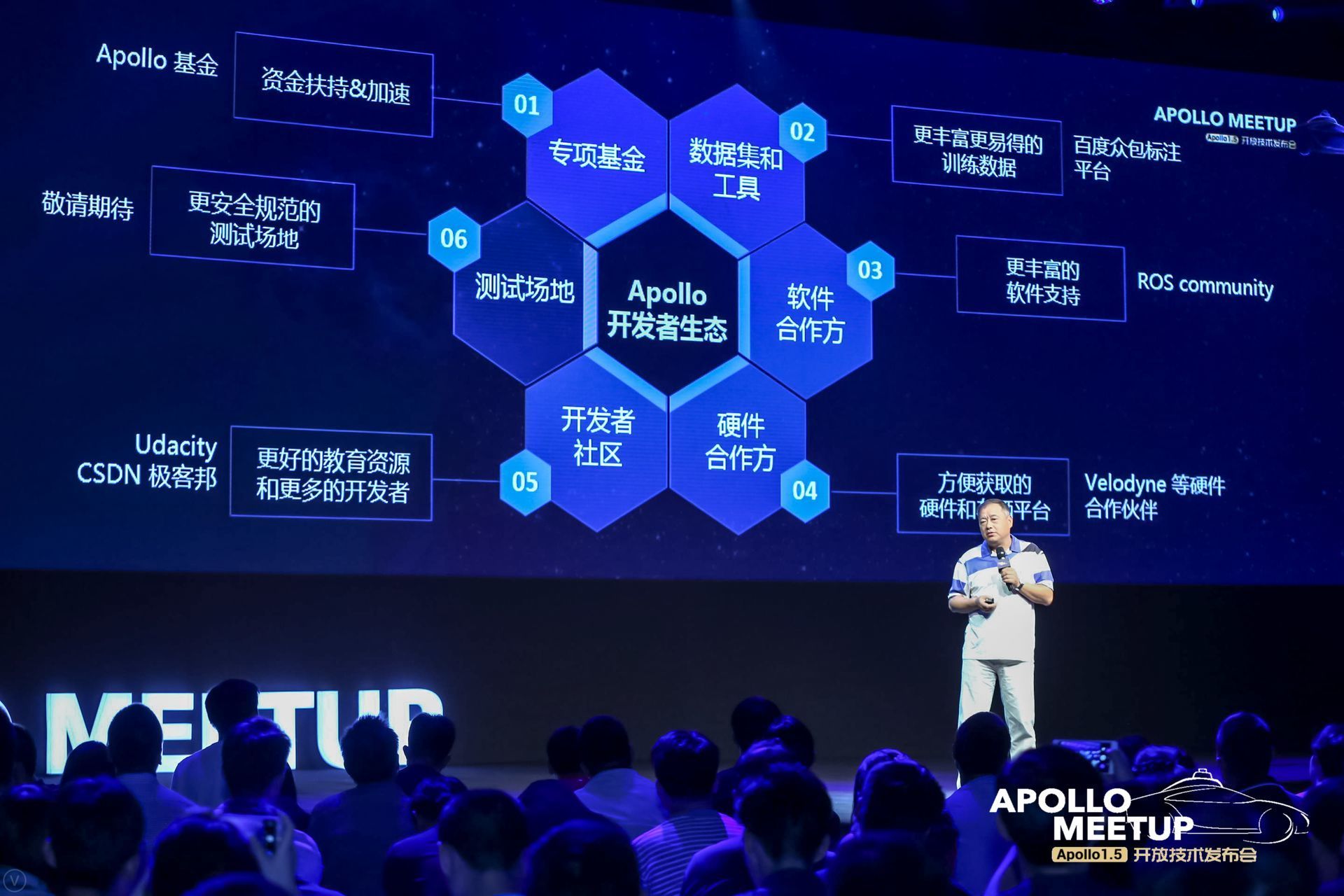
而除了百度将自己多年的积累打包输出能力之外,作为「Apollo 计划」内的合作伙伴也为 Apollo 这个巨大的生态贡献了很多自己的力量,这次也公布了非常多的合作。
- 参考硬件-LiDAR: 作为 Velodyne 的早期投资者,Velodyne 将为 Apollo 生态成员提供专门渠道来获取产品信息,享有更短供货周期,并提供技术支持。

- Apollo 基金「双百计划」,早在 7 月 5 日,百度 AI 开发者大会上,百度宣布与长江产业基金会成立 Apollo 基金。目前,Apollo 基金首期 20 亿资金已到位,已完成多起投资。未来三年,Apollo 基金生态将投资 100 亿,同时实现 100+个项目的投资。
- 独一无二的自动驾驶数据标注服务,Apollo 平台提供数据标注服务,将大大提升研发效率,支持自动驾驶车 2D、3D、高精地图等 20+种标注场景,为百度无人车及行业知名客户提供数据标注服务。
- Udacity 成为 Apollo 合作伙伴:双方将联合开发课程,举办竞赛,选拔优秀人才。
- Apollo&ROS:双方将推动 ROS community 和 Apollo 生态的深入合作。
- 百度携手 CSDN 和极客邦共建开发者社区,举办技术沙龙、制作自动驾驶公开课,早期众测 Apollo 开放代码等等。
这些合作也让 Apollo 成为业内非常扎实全面的开发者生态,从软件、硬件、专项资金、数据集和工具、开发者社区、测试场地等多方位赋能给开发者。
目前,Apollo1.5 的这些能力已经率先在一些自动驾驶团队中得到验证,自动驾驶团队 Momenta 基于 Apollo1.5 的能力,让车拥有了一个「大脑」。经过各种道路测试证明,不管是在白天,还是在夜晚恶劣的视觉环境下,实现了完成前车突然并线、行人、自行车横穿马路等典型交通场景的精准识别。智行者科技、海德专用汽车有限公司合作研发的首款无人驾驶扫路机「蜗小白」,也在开放园区场景实现了定点起停、自主作业、智能循迹、后台监控、自动避障等功能。
百度想要的究竟是什么?
Apollo 生态这次还公布了新增的 17 家合作伙伴,规模达到了 70 家,这次百度副总裁邬学斌也透露,百度对加入「Apollo 计划」的合作伙伴的能力同样是有一定要求的,并不是求量。
新加入 Apollo 联盟成员包括:华阳集团、北斗星通、CSDN、ESD、现代汽车、力帆汽车、Momenta、neousys 宸耀科技、NovAtel、先锋、同行者、优达学城(Udacity)、一嗨租车、远特科技、远峰科技、中科慧眼。
从发布「Apollo 计划」到更新 1.5 版本,百度是希望输出自己的能力来帮助它构建的这个生态内的合作伙伴一步一步的实现完全自动驾驶的能力,或者说不断的补全自己的短板。
百度更是每周持续更新开源代码,不断拓宽应用范围,探索新车型新硬件的移植,并不断的把这些能力输出,但我们不禁在思考这样的类似于「公益项目」的不断贡献,百度能得到的又是什么?百度辛辛苦苦打造的「Apollo 计划」又是为了什么?
前期的理解是 Apollo 就是希望创建一个快速创新的良性循环,鼓励合作伙伴在各专业领域贡献,实现资源优势互补,随着更多生态合作伙伴加入并持续贡献,实现共赢。
例如 Apollo 仿真引擎,它就能够让开发者日行百万公里,当然,开发者在研发过程中也同样能产生高质量的数据,高质量的数据又能「反哺」从而提升阿波罗的技术。
但如果从作为上市公司的百度来说,从盈利模式的角度该怎么理解?百度副总裁邬学斌在接受采访的时候提到了非常关键的一个点「是从云端提供服务」。

(百度副总裁邬学斌)
我们能看到百度云端服务平台包含了高精度地图、仿真引擎、数据平台、云安全、空中下载等等,所以百度依靠 Apollo 核心的高精度地图和高精度定位的能力不断吸引合作伙伴,释放自己的云端能力,同时在通过众多的数据「反哺」强化自己在云端的服务能力,也许这才是 Apollo 的关键点,最后顺便,百度也能成为完整自动驾驶方案的提供商。
所以管理开发者或者说参与者的预期,引导他们真正为「阿波罗计划」有所作为有所贡献,是百度在接下来的时间内不断去落地实现的。

按照计划,今年 12 月的时候 Apollo 还会开放云端服务平台的安全模块、开放软件平台的神经网络模块、参考硬件平台的毫米波雷达以及黑盒,这时 Apollo 将更新至 2.0 版本,Apollo 2.0 将能够实现简单城市路况的自动驾驶。
「阿波罗计划」无疑是百度下了重注的一个典型的旗帜和代表,要维持这熊熊火焰不断燃烧?不停奔跑和释放就是百度正在给出的答案。


