

当绝大多数公司选择“自上而下”的路径——用大模型理解任务,用海量数据训练端到端策略时,一家名为橡木果机器人(Acorn Robot)的公司却走出了一条截然不同的道路:自下而上,从底层本能出发,让机器人在与物理世界的交互中自主涌现操作智能。
当绝大多数公司选择“自上而下”的路径——用大模型理解任务,用海量数据训练端到端策略时,一家名为橡木果机器人(Acorn Robot)的公司却走出了一条截然不同的道路:自下而上,从底层本能出发,让机器人在与物理世界的交互中自主涌现操作智能。
这家由清华机械工程博士、哈佛神经科学博士后领衔的团队,用9年时间,走完了从理论发现到产品商业化的闭环。
一、起点:一个被长期忽略的关键发现——操作存在本能
正是创始人在哈佛的神经科学研究经历,让他意识到一个被机器人领域长期忽略的事实:操作与语言,底层机制截然不同。
- 语言没有先天本能:小孩不接触语言,一辈子不会说话。
- 操作恰恰相反:全球所有人抓取物体的行为高度一致,从未有人“教”过我们如何抓取。这证明操作背后存在本能——出生即有、不受环境影响。
这个发现成为橡木果技术路线的原点:与其让机器人模仿人类,不如赋予它类人的操作本能,让它自己在交互中“长”出能力。

二、审视主流路线:没有最好的预训练模型,只有最适配硬件的模型
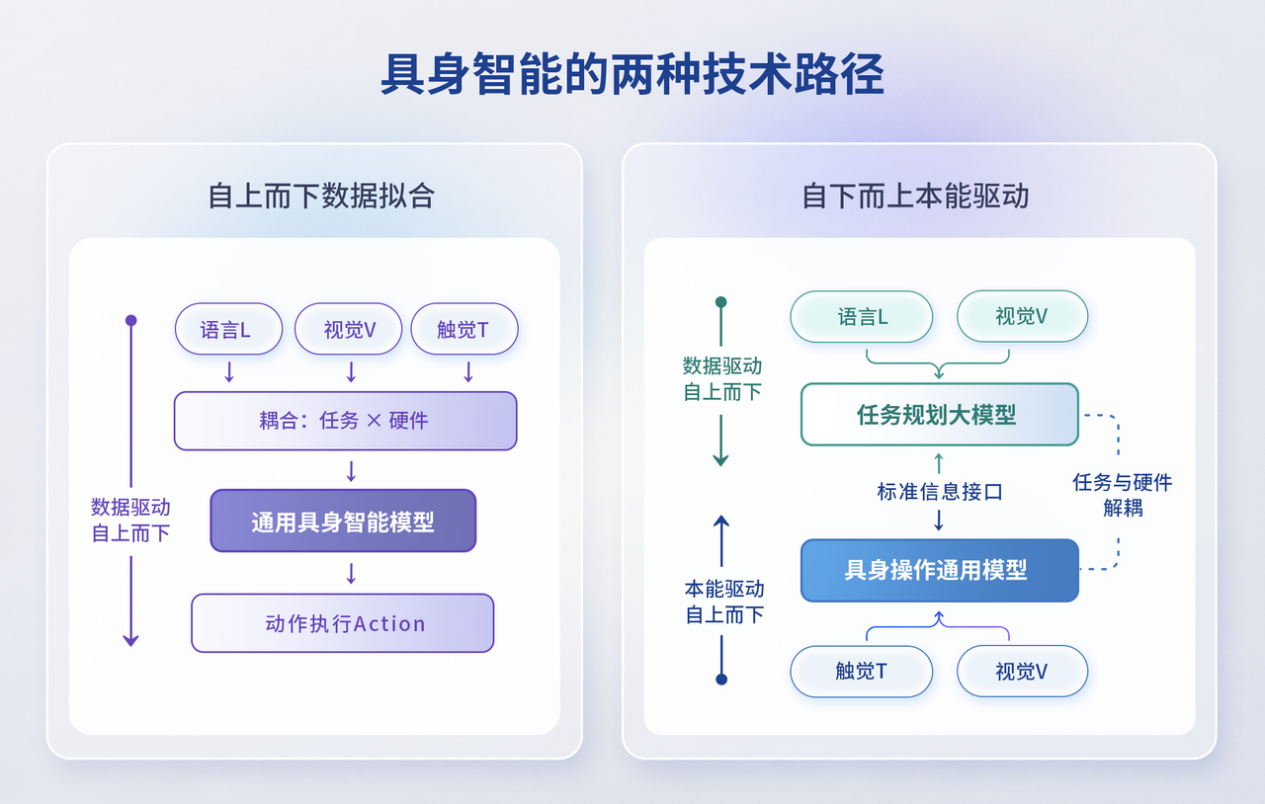
当前主流的VLA(视觉-语言-动作)架构,将任务规划与操作执行耦合在黑箱中。这种自上而下的路线,面临三大无法回避的困境:
- 数据规模爆炸:语言只涉及一个模态,而操作涉及语言、视觉、触觉三个模态,且与具体硬件强相关。一旦耦合,数据量呈指数级增长,任何公司都无法覆盖。
- 算力需求无法满足实时性:操作要求毫秒级响应,无法像语言模型一样“一个字一个字地蹦”。当物体即将滑落,机器人没有等待的时间。
- 泛化迁移困难:“换场景就失灵”如同魔咒,阻碍落地。
更深层的问题是:任务泛化与硬件泛化的逻辑完全不同。任务(如“叠衣服”)是知识层面的,可以规则统一;但执行必须适配每一个硬件的个体差异——即使两个一模一样的夹爪,导轨松紧不同,模型参数便天差地别。
橡木果用了一个生动的类比:打乒乓球的规则全世界一样(任务),但每位选手的打法完全不同(硬件适配)。结论是:没有最好的预训练模型,只有最适配硬件的模型。

三、橡木果路径:任务与执行解耦,自下而上构建通用操作
橡木果认为,任务规划与操作执行应彻底解耦,各自独立演进,通过标准化接口协同工作。
- 任务规划层:负责知识推理、任务分解,输出关键图像帧和语义约束(如“不要洒水”),而非具体动作指令。
- 操作执行层:这是橡木果聚焦突破的层面。由具身本能出发,自下而上涌现操作智能。
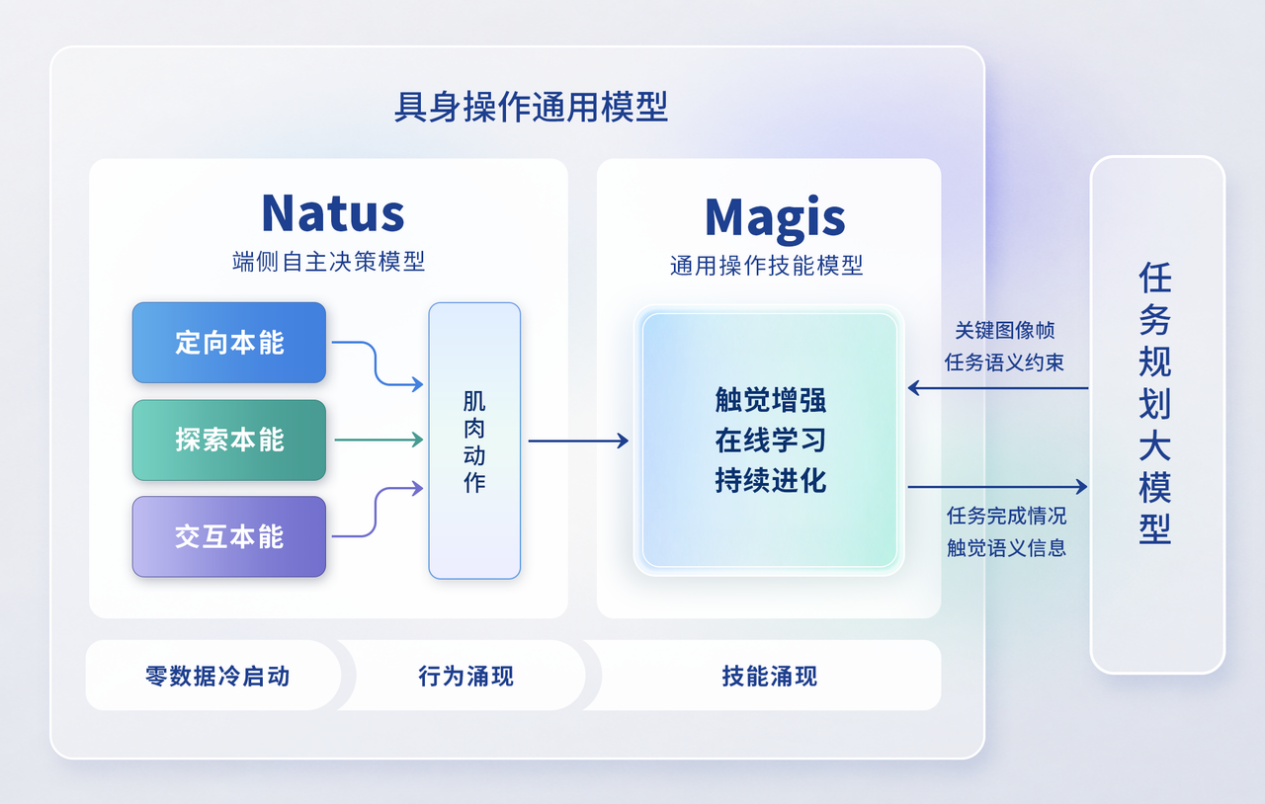
核心模型包括两个:
Natus——端侧自主决策模型:零数据,冷启动,即插即用
Natus完全嵌在末端执行器中,由触觉刺激直接驱动,毫秒级响应。它赋予机器人三大本能:
- 定向本能:与视觉协同,指引末端向目标移动。
- 探索本能:接触物体后,通过感知滑移、形变等触觉信息,自主探索并寻找稳定接触构型,并非通过预设程序或模仿学习。
- 交互本能:以“滑移最小化”为目标,实时调节“肌肉张力”,抓豆腐时松,抓锤子时紧。
Natus赋予的核心能力是零数据冷启动、硬件自适应和毫秒级响应。它出厂即具备操作本能,可实现“一上来就会做”。
在测试中,机器人面对从未见过的异形物体,会沿表面自主探索、实时调整策略。
- 面对半瓶水的瓶子,它会反复试探重心,逐渐调整抓力。
- 面对极薄的卡片,它通过不断尝试“推、翘、扣”,成功抓起。
- 面对易碎的豆腐、受扰动的铁皮卷,抓取力始终实时调整,确保稳定。
这些行为不是编程预设,而是本能催生出的行为涌现。这种规律可类比万有引力:它不规定具体轨迹,却支配了无穷行为。
Magis——通用操作技能模型:跨本体、跨任务,一上手就熟练
Magis的使命是让机器人实现“一上来就熟练”。其实现路径颠覆行业:利用Natus在真实交互中产生的、带有精准触觉语义的数据,对视觉数据进行语义增强,再训练技能模型。
例如,当Natus抓取一个香蕉,它记录的不仅是“成功了”,还有“120g、质心偏左、表皮粗糙、硬度中等”等力学语义。这些数据被叠加到视频帧上,使Magis能“理解”物理世界,而非仅仅识别外观。训练数据需求因此从百万小时级别降至几千小时。
四、触觉:构建操作信息底座,完备性是第一原则
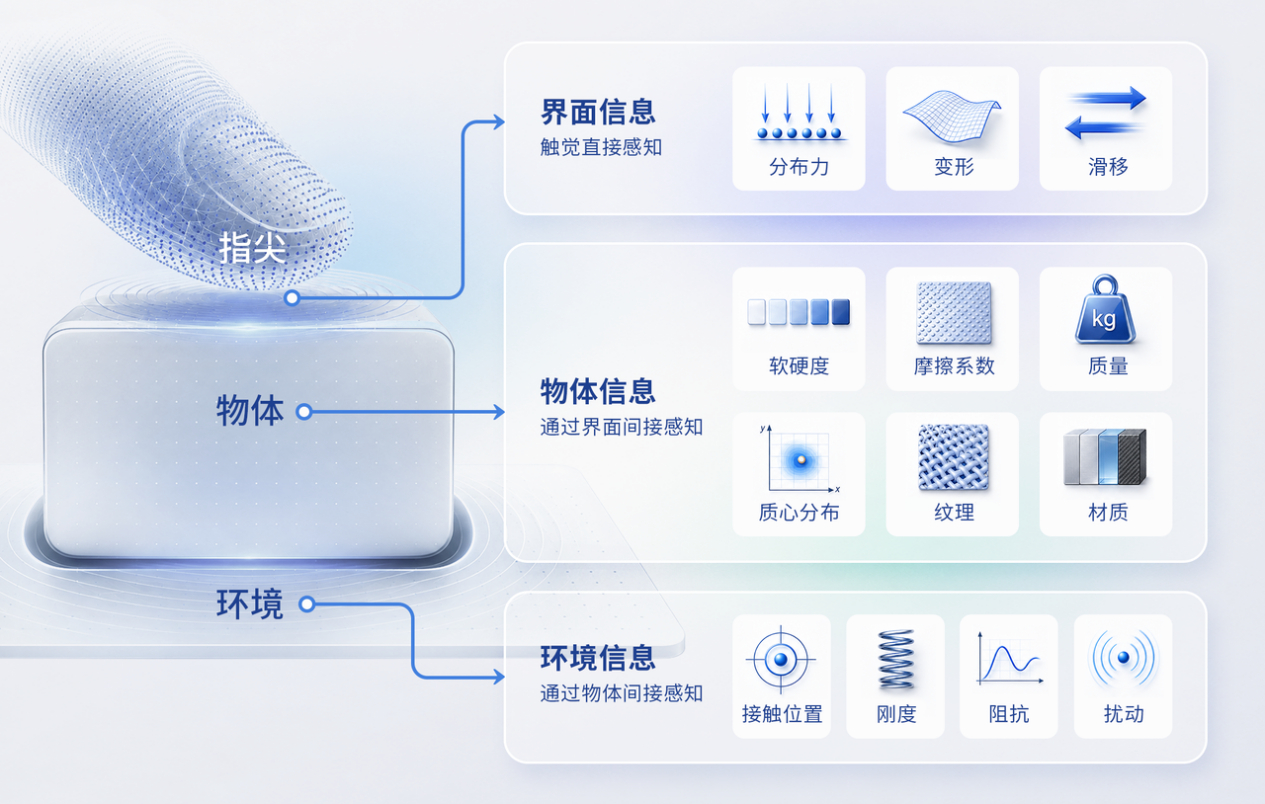
一切根基始于本能,而本能的构建需要完备的触觉输入。橡木果将操作相关的触觉信息分为三类,缺一不可:
- 界面信息:分布力、变形、滑移(最为关键)。
- 物体信息:软硬度、摩擦系数、质心分布(视觉无法获取)。
- 环境信息:接触刚度、阻抗等(装配、打磨等任务所需)。
为此,橡木果历时7年迭代,自研第三代视触觉传感器,拥有动态表征、工程化标定、算力集成等坚实壁垒。
五、商业先行:非共识路线,已跑通落地闭环
橡木果的技术并非空中楼阁。公司聚焦于工业柔性生产(消费电子、日化、新能源汽车、生物医药),凭借Natus“零数据冷启动”特性,仅用两个月时间,即在全球头部化妆品ODM厂商完成POC验证并实现商业营收。机器人被要求抓取、旋拧、放置形状、材质各异的化妆品瓶罐,其快速适配能力赢得高度认可。
团队表示:“工业场景任务规划相对固定,我们不需要等待上层大模型成熟,就能用底层操作能力产生商业价值。”
2026年3月,橡木果完成近亿元种子轮融资,领投方包括钱唐材料实验室、普华资本等。
六、回归本源:一枚橡果,撼动全局
在大模型、大数据、大算力的热潮中,橡木果的选择是回归物理世界的第一性原理。公司的长期目标是成为全球具身智能领域不可或缺的底层基座,让每一台机器人都能快速上手、稳定动手。

一枚橡果,既是收获的果实,更是孕育无限可能的种子。这正是橡木果的品牌内核,与其“本能驱动、自下而上”的路线一脉相承。从非共识理念到改变行业范式的实践,橡木果正在为具身智能的未来铺就一条全新的、更坚实的道路。

关于橡木果机器人
橡木果机器人(Acorn Robot)成立于2024年底,核心团队融合清华大学机械工程与哈佛大学神经科学前沿交叉背景。公司致力于为通用具身操作构建全新的技术基座,让机器人真正拥有与生俱来的类人本能与操作智慧。
团队自2011年起深耕机器人操作领域,2017年率先提出“本能驱动”具身智能这一非共识技术路线,并于2018年搭建实验室团队。2025年正式启动商业化,在短短一年内完成从技术积累到落地的闭环,以鲜明的底层技术逻辑,引领新一代具身智能发展范式。


