

摘要
逐际动力全尺寸人形机器人最新测试曝光,展现了整机工程化升级,实现全身多关节协同大范围运动,完成一系列稳定、高动态的全身复杂动作。
逐际动力全尺寸人形机器人最新测试曝光,展现了整机工程化升级,实现全身多关节协同大范围运动,完成一系列稳定、高动态的全身复杂动作。
整机架构工程化稳步提升
- 采用中空关节设计
- 实现动力缆线和通信线缆排布优化,大幅提升机器人的稳定性
- 赋予机器人更大的关节活动范围,支撑机器人实现大幅度动作
- 高力矩密度关节能够输出强大扭矩并实现高性能关节控制,全面提升运动控制算法的控制效果,让机器人以流畅、稳定的姿态完成复杂的全身运动。
能屈能伸:从“亚洲蹲”到“躺平”
腿部可实现高度拟人化的大角度屈曲-伸展,下肢关节活动范围更大,结合腰部及颈部俯仰运动,完成全身重心动态平稳下落。

机器人完成仰躺时实现“亚洲蹲”
稳扎稳打:“帕梅拉”深蹲
高力矩密度关节提供更强劲的动力,下肢关节具备更大活动范围,可实现反复大幅度蹲起,并始终保持全身姿态平衡。

机器人保持深蹲姿态
灵活扭转:甩腰
腰部可大范围全向旋转,始终保持全身稳定。
机器人全身稳定状态下旋转扭腰
强大动能:俯趴-站立
超360°旋转胯关节,可以连续旋转。髋、膝盖、脚踝可协同实现更强运动能力,机器人起身后可保持稳定站立姿态,及全身协调下的前后移动。
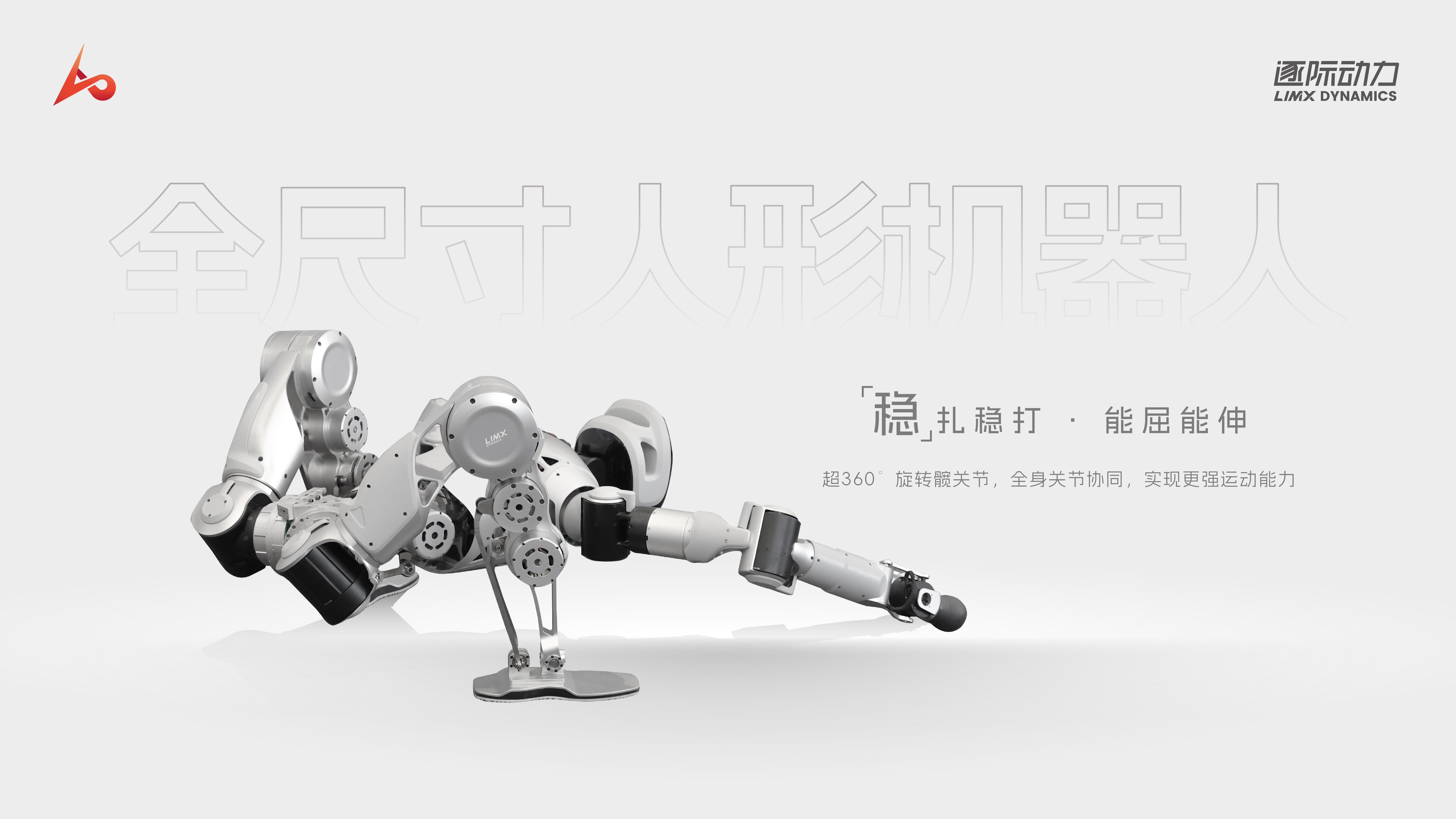
机器人完成超360°胯关节旋转


