

软硬结合是地平线一直以来坚持的战略方向, 余凯也曾多次在公开场合表示, 未来智能化的竞争一定是「软硬结合」
「以软件为牵引、硬件为驱动, 打造出面向全场景、全生态的软硬结合智能驾驶系统, 并以极致的开放打造极致的效率, 抵达智驾终局。」地平线创始人&CEO 余凯在地平线 2024 智驾科技产品发布会上说到。
软硬结合是地平线一直以来坚持的战略方向, 余凯也曾多次在公开场合表示, 未来智能化的竞争一定是「软硬结合」。

软硬结合非一日之功
在智能驾驶迈向全场景大规模普及的关键节点, 软硬结合充分发挥性能优势, 是高阶智驾普惠落地的必然路径。
这一点, 过去的商业发展历史给出了有力证明。从个人电脑时代 PC 端 Windows 系统跟 Intel 的 X86 计算架构的紧密耦合、移动互联网时代 Android 跟 ARM 之间软件和硬件的协同, 软硬结合在每一次产业变革中都发挥着关键技术价值。
在智驾领域, 从 BEV 感知系统、OCC、Transformer 模型、再到端到端, 短短几年, 每次重大技术革新都推动智能驾驶的进步。智能驾驶的感知、决策、执行, 每个环节都涉及软硬件。
随着汽车智能化功能不断被强调, 软件算法的复杂性随之增加, 对计算能力的需求也在快速增长。这意味着硬件需要拥有更高的性能, 以支持软件层面的高效运行。此外, 软件迭代还带来了兼容性和稳定性问题。每一次软件的更新, 都可能对硬件的接口、驱动程序等提出新的要求, 这要求硬件设计不仅要具备前瞻性, 还要能够灵活地适应各种变化。

面对这些难题, 软硬结合成为智能驾驶一项极为复杂且重要的系统性工程。不仅要求软件和硬件之间的紧密配合, 还需要在设计过程中充分考虑到两者的特点和需求, 以实现最优的整体性能。
然而软硬结合的实现并非一日之功, 它需要经历长时间的技术积累和实践经验的沉淀, 才能释放最大价值。一方面, 智驾技术具有高复杂性的特点, 在有限的资源下, 要求系统设计和优化能够高效、稳定运行, 且响应速度足够快。
另一方面, 车规级开发对稳定性和可靠性的要求极为严格。智能驾驶系统不仅要在实验室环境中进行验证, 还需要在真实的路况和复杂的驾驶场景中进行长时间的测试。包括各种极端天气条件、复杂的交通环境以及突发情况的处理等。通过这些测试, 发现系统存在的问题并进行修复, 以确保系统的稳定性和可靠性。同时, 在量产过程中, 要对系统的性能进行持续的监控和评估, 不断调试优化, 以确保系统稳定地运行在每一辆车上。
软硬结合的前瞻战略引领产品研发
2024 年被视为高阶智驾拐点, 传统外资品牌也纷纷加入 NOA 大军, 如大众、通用、丰田、奔驰、宝马等, 今年也都将陆续在中国市场首次交付 NOA 智驾功能;新能源市场自主品牌迫切需要加快 NOA 下沉, 而降本是推动的关键。
充分发挥硬件性能, 是降低智驾门槛的解法之一, 软硬结合能力至关重要。
成立于 2015 年的地平线, 是中国第一个从事专用深度神经网络计算方案设计的公司, 并且是用于自动驾驶和机器人的创业企业。
自成立之初, 地平线就认识到智能驾驶技术的复杂度, 前瞻判断软硬结合的全栈技术是推动智能驾驶不断进化的关键和基石, 由此确立了坚定的软硬结合战略路线并持续深耕。

基于软硬结合的前瞻战略, 地平线在智驾技术研发过程中, 强调软件和硬件的协同性, 以实现最佳性能和效果。
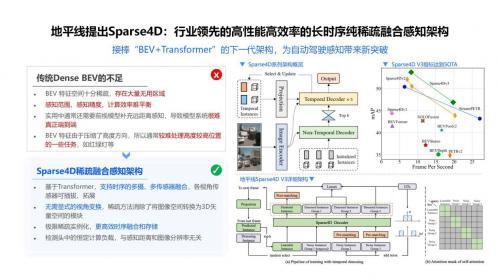
然而, 技术研发并非易事。支撑地平线不断探索创新技术的是其在软件算法方面的世界级创新研发能力。早在 2016 年地平线便率先提出了自动驾驶端到端的演进理念, 又在 2022 年提出了自动驾驶感知端到端算法 Sparse4D。去年, 地平线研究员作为第一作者在业界首个公开发表的端到端自动驾驶大模型 UniAD, 还获得了 CVPR 2023 最佳论文, 在整个行业里面产生很大的影响力。
在研发方向方面, 地平线没有选择走通用计算架构路线, 而是针对智能驾驶需求自主设计研发了创新性智能计算架构 BPU。通过算法、编译器、架构设计三者相结合, 赋予了 BPU「智能进化」的能力。面对智能驾驶海量的数据处理需求和复杂的计算,BUP 在软硬结合技术路径的引领下, 经数据驱动实现自动化验证, 推动智能进化, 从而让机器更自主、让开发更简单、让计算更智能。
在研发路径方面, 地平线基于层层递进的正向开发理念, 构建了以算法需求为导向的计算方案设计体系。从算法原理原型设计出发, 到计算方案设计, 再到形成软硬件全栈系统, 最终实现量产上车应用。
在三代征程量产技术沉淀与 500 万前装量产经验积累下, 地平线在 4 月 24 日智驾科技产品发布会上, 推出新一代车载智能计算方案征程 6 系列, 共六个版本, 包括征程 6B、征程 6L、征程 6E、征程 6M、征程 6H、征程 6P, 面向不同智能驾驶场景进行了灵活配置, 均能提供兼顾性能与成本的最优解。

地平线产品研发实现了从单点式向系列化的关键跃迁, 从一体机到域控, 从主动安全到全场景智驾, 征程 6 系列可以全方位覆盖智能驾驶全阶应用。同时, 拥有统一的硬件架构、统一的工具链以及统一的软件栈, 具备同代一致、代际兼容、系统最优, 平台化可拓展的计算架构, 以及配套一致、完整成熟的量产开发平台。 预计今年第四季度征程 6 系列将完成首批量产车型交付, 并计划在 2025 年实现超 10 款车型量产交付。
征程 6 搭载 BPU®️ 纳什架构, 原生支持大参数 Transformer、交互博弈等智能驾驶先进算法, 实现软硬结合的极致优化, 同时灵活满足智能驾驶全场景量产差异化需求, 为客户提供兼具极致性能与应用效率的专用计算方案。
软硬结合全栈技术加速高阶智驾应用突破
秉承软硬结合的前瞻技术积累和工程化量产经验, 地平线不断推动智驾功能的应用和创新, 加速高阶智驾应用的突破, 提升用户智驾体验。
今年城区 NOA 成为行业竞争的新焦点, 但大多数车企的城市 NOA 仍处于起步阶段, 适用场景有限, 驾驶体验不佳, 无法满足用户的智驾需求。地平线认为, 智驾系统将经历从可用、好用到爱用的三个发展阶段。而好的智驾应用来源于对用户需求的深入洞察, 不仅保障行驶的物理安全, 还能给驾驶者提供心理的安全感, 最终达到用户爱用状态, 同时实现科技平权, 普惠大众。
从可用、好用到爱用, 是对软硬结合系统能力的综合考验, 不仅要求前瞻软件算法的深厚积累与应用, 也考验软件与硬件协同的量产效率。
征程 6 系列车载计算方案与 SuperDrive 全场景智能驾驶解决方案的发布, 是地平线软硬结合的全栈技术实力与规模量产的策略布局的表现, 实现了以软件算法驱动硬件设计, 面向全场景的高阶应用突破。
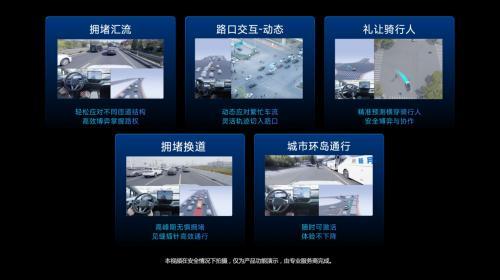
SuperDrive 搭配征程 6P 打造出最佳的软硬结合高阶智驾系统, 聚焦拟人化体验突破, 打造好用的智驾系统 2.0。SuperDrive 凭借动态、静态、OCC(Occupancy 占用网络) 三网合一的端到端感知架构, 数据驱动的交互式博弈算法, 让系统可以像老司机一样, 能更加灵活优雅的处理拥堵汇流、路口交互-动态 Driveline、礼让骑行人、拥堵换道、城市环岛通行复杂的路况, 同时兼顾场景的通过率和通行效率。在此架构下, 拥堵场景下变道成功率提升 50%, 路口通过率提升 67%。
同时, 面向车企与产业链伙伴,SuperDrive 致力于提供高阶智驾样板间, 通过全栈技术能力的灵活开放, 支持提高研发与交付效率。
从 2019 年推出的第一代车规级计算方案到今天合作超过 110 款量产车型上市, 在长久的战略定力下, 地平线凭借产品技术和量产经验积累, 以终为始厚积薄发, 逐步构建了软硬结合的全栈技术能力, 稳占智能驾驶科技公司第一梯队。同时坚持以用户价值为核心, 打造最开放协同的公众利他生态, 与车企和生态伙伴一起推动汽车智能化演进, 让更好体验的智驾科技, 向下流淌至每个用户的每刻、每程。
来源:News 快报


