

近日,中国汽车基础软件生态委员会(AUTOSEMO)第二届一次委员会暨「多元协同构建汽车软件新生态」主题论坛正式召开。
近日,中国汽车基础软件生态委员会(AUTOSEMO)第二届一次委员会暨「多元协同构建汽车软件新生态」主题论坛正式召开。作为行业领先的自动驾驶技术公司,毫末智行受邀参会,并且凭借在增强自动驾驶激光雷达地点识别领域获得的领先成果,毫末数据智能体系 MANA 应用的 Overlap Transformer 位置识别算法成功入选 2022 AUTOSEMO 自动驾驶类创新产品优秀案例。在此之前,Overlap Transformer 算法论文已正式入选智能机器人国际顶会 IROS 2022,并进行了对外开源。
伴随近几年由软硬件驱动的自动驾驶技术方案逐渐进入规模化量产阶段,数据驱动自动驾驶算法进化已成为大势所趋,而如何利用大数据与大模型进一步完善 AI 算法,则成为了当下最为关键的课题。借助 Transformer 大模型,毫末智行数据智能体系 MANA 提出了 Overlap Transformer 算法,可实现基于激光雷达的高效、旋转无关的位置识别能力。

Overlap Transformer 由 Range Image 编码器、Transformer 模块、全局描述子生成器三个模块组成。其能够利用激光雷达产生的三维距离图像,在不使用其他信息检测 SLAM 的 loop closure 候选&地点识别、不进行微调的情况下,将激光雷达数据推广到不同的环境中,并在长时间跨度的室外大规模环境中实现长期位置识别。这一高效、精确的位置识别算法的应用,使得毫末自动驾驶技术能在针对多角度地点的识别具备更强的鲁棒性。
毫末智行介绍,基于激光雷达的地点识别,在实现自动驾驶中有着极高的意义与价值。首先,地点识别算法能够为激光雷达 SLAM 的回环检测提供位置先验验证,从而促使寻找到正确的回环,其次则是可以在事先采集的点云地图中直接进行全局定位。
但另一方面,这也需要地点识别算法解决以下问题:一是高效性,即车辆可以最快的时间通过地点识别算法在实现采集的地图中确定自身位置,进而服务于后续算法;二是 yaw 角旋转不变性,即车辆从多个角度观测同一地点时,得到的地点描述子是要高度相似的。
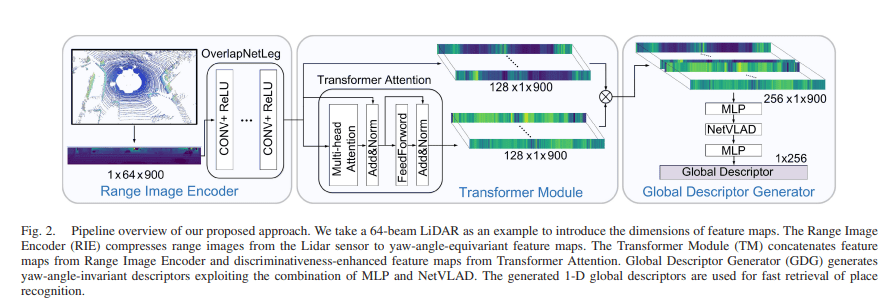
由此,毫末智行提出了 Overlap Transformer。其仅利用三维点云投影的深度图,就能生成用于地点识别全局描述子,保证算法泛化性能;并利用 Transformer 结构增强全局描述子特异性,提高识别精度;此外,还能利用 NetVLAD,在对全局描述子进行压缩、提高算法的运算速度的同时,将 yaw 角旋转等变转换为 yaw 角旋转不变,增强算法鲁棒性。
毫末智行表示,当前针对 Overlap Transformer 的测试主要分为五个部分,分别为回环检测性能测试、全局定位性能测试、yaw 角不变性测试、Transformer 模块消融试验与实时性测试,而在测试之后,Overlap Transformer 的各项结果也都表现优异。这不仅能帮助数据智能体系 MANA 实现更高效训练海量数据,也能提升毫末智行自动驾驶技术在标注、构建带有时序特征的真实场景时的准确性,从而输出最贴近人类驾驶的成熟规控策略。
据悉,AUTOSEMO 由中国汽车工业协会于 2019 年组建成立,聚集中国汽车产业链上的头部整车企业和汽车软件供应商,旨在联合汽车及软件产业内成员,形成由中国本土企业主导的共同规划和创建适应新需求的软件架构与接口规范,做强本土基础软件,推动行业开放和协作,促进产业向更智能化的方向发展。此次 Overlap Transformer 入选 2022 AUTOSEMO 创新产品优秀案例,正体现了 AUTOSEMO 对毫末智行技术能力的认可。

以大数据与大模型为依托,毫末智行数据智能体系 MANA 成功推动自动驾驶技术在感知、认知、标注、仿真、计算等领域得到了快速发展,并由此实现了三代 HPilot 辅助驾驶产品的快速迭代与十余款量产车型的问世。当前,毫末智行也正在依托领先的数据智能体系 MANA,以零事故、零拥堵、自由出行和高效物流为目标,助力合作伙伴重塑和全面升级整个社会的出行及物流方式。
来源:搜狐网


