

过去一年,消费级机械臂市场快速增长,「轻量级」、「小型化」、「协作」已成为行业新的关键词。
作者 | 鱼三隹
编辑 | 郑玄
猫咪,机械臂,两个看起来八竿子打不着的事物,却因为用户的突发奇想,碰撞出了有趣的火花。
日本的富士新闻网曾报道过这样一条新闻:早出晚归的主人为了让猫咪独自在家时不无聊,将逗猫棒安装在一个小型机械臂的末端,通过操作机械臂,定时定点逗猫。视频中,每当机械臂来回挥动逗猫棒,猫咪就会跟着玩耍。

机械臂成「逗猫」神器
这着实有些颠覆人们对于机械臂的固有认知。
在过去的印象里,机械臂都是些工厂里的大家伙,就算体格不大,材质样貌也一定是钢铁构成、坚硬无比。
随着机械臂技术的成熟,加之人工智能的发展,「轻量级」、「小型化」、「协作机械臂」已然成为机械臂行业新的关键词。除了逗猫,协作机械臂还能帮助人们泡茶、制作咖啡、采摘水果……机械臂正在从工厂走入极客群体、甚至是普通消费者的生活中,其使用场景正在无限拓展。
01 走出工厂,走向协作
根据构造、应用场景、负载精度等不同需求,机械臂可以细分为数个赛道,「协作机械臂」是近年来发展势头正猛的细分赛道之一。
在人们传统印象中,机械臂大多应用在工厂、流水线上,每一步操作都有详细、规范的流程,完成任务靠得是工程师提前编辑好的指令,不仅体型巨大,用起来不够灵活,而且成本极高,普通人无法企及。
「有没有一种可能性是让更多的人都能使用机械臂,而不仅仅是在工厂里机器做着固定的任务,丝毫没有和人们的互动?」怀揣着「让机械臂更有生命力」的想法,宋君毅于 2016 年创办了大象机器人,专攻协作机械臂,文章开头逗猫案例中使用的机械臂,就是该公司研发的协作机器人 myCobot。

宋君毅
在中国,协作机械臂领域的创业公司大多起步于 2015 年前后,例如聚焦生产协作机械臂的越疆科技、遨博智能、慧灵科技均成立于 2015 年,大象机器人成立于 2016 年。
据 GGII 统计,2015 年—2020 年,国内协作机器人市场共计融资 47 例,仅 2021 年上半年,行业内就有 10 笔融资,总规模超过 30 亿元。
与传统机械臂相比,协作机械臂最大的区别在于「人机协作」,它一改往日传统机械臂僵化固定的工作模式,不但能与人在同一个环境里共同工作,还在一定程度上实现了人机互动。
协作机械臂的概念最早诞生在欧洲。
2003 年,Esben Ostergaard 在南丹麦大学进行一个有关寻找液压执行结构替代方案的课题研究,但他和合作伙伴找遍了市面上所有已存的机器人,也无法找到能够满足灵活、易用且使用时无需防护的产品。
既然找不到合适的,Esben Ostergaard 萌生了自己创办机器人公司的念头。
2005 年,他和另外两个合伙人一起创办了 Universal Robots(优傲机器人),并在 2008 年终于研发出第一台协作机械臂 UR5,成为协作机械臂的先驱。
同一年,另一家协作机械臂的先驱公司 Rethink Robotics 成立,2011 年 Retink 也推出了自己的协作机械臂 Baxter。
自此,协作机械臂的概念开始慢慢为机器人行业所接受,国外一大批新创立的协作机械臂公司涌现,就连传统的四大巨头(ABB、发那科、库卡、安川),也逐渐开始布局协作机械臂业务。
相比之下,国产的机械臂虽然起步要晚,但是据 GGII 的数据表明,目前国内的协作机器人市场,接近 70% 的份额由本土厂商占据。
当被问及为何国内机器人公司纷纷瞄准协作型机械臂时,宋君毅向极客公园介绍道:「从行业饱和度来说,因为重工业级别的机械臂市场几乎由四大巨头垄断;从市场机会和客户需求的角度出发,想进行创新最好选择其他细分市场。协作机械臂符合人机互动的趋势,而且易入门、成本合适,市场前景也宽阔。」
02 协作机器人爆发的背后
国内轻量级协作机械臂市场爆发的背后有三大因素:国产机器人市场的增长,技术环境的发展以及应用需求的增长。
用大象机器人 CEO 宋君毅的话来说,这是集合了「天时、地利、人和」的结果。
2016 年,中国机器人密度是 71,而到了 2021 年,中国机器人密度已经达到了 246,这意味着每一万个制造业人口拥有 246 台机器人,在最近的 5 年里,中国是全球机器人密度增长的主要驱动市场。
据据智研咨询发布的数据显示,中国机械臂品牌市场规模从 2014 年的 6.51 亿元增长至 2018 年的 22.83 亿元;国外品牌市场规模从 2014 年的 72.45 亿元增长至 2018 年的 126.36 亿元。四年里,国产品牌的市场规模翻了三倍多,而国外品牌的市场增速还不到一倍。
「小型的机械臂在行业中其实很早就有,但是最近几年小型协作机械臂市场之所以集中爆发,主要还是得益于技术的发展。」施格自动化总经理张立向极客公园表达了他的看法。
对于协作机械臂而言,要想实现安全地与人类相互配合,有三方面的技术能力十分重要。
其一是力感知能力,通过对外力的感知来判断人的行动,以此减缓或者停止运动;其二是视觉感知能力,通过视觉雷达判断人与机器的距离是否安全,机械臂是否需要减速运转;其三则是计算能力,由算法和软件根据力感知和视觉感知作出反馈、下达指令。
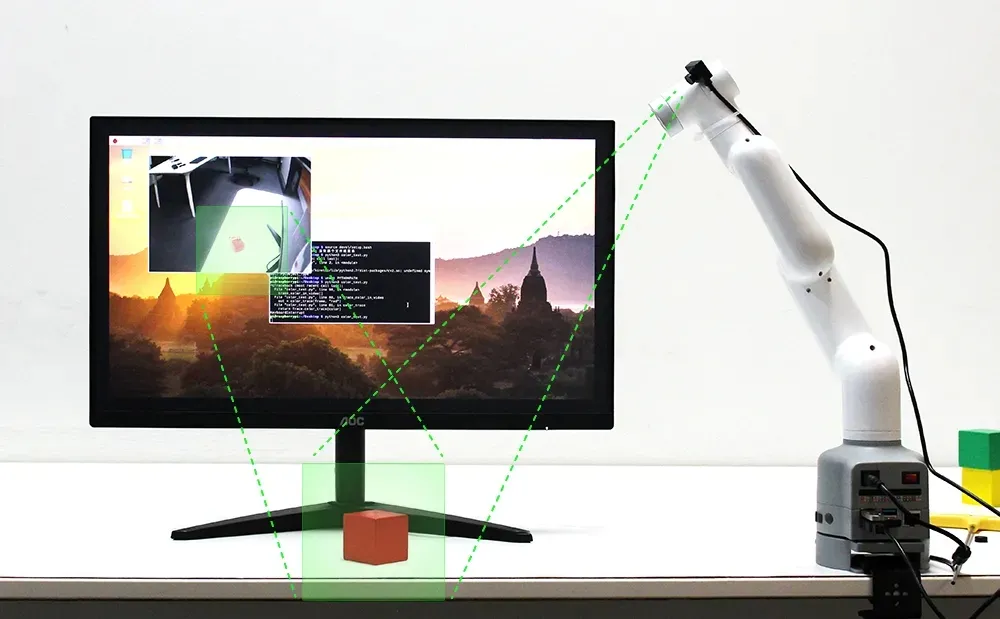
协作机械臂的「颜色识别」功能
力感知能力自上个世纪九十年代发展至今,是相对最早成熟的技术基础,而高分辨率的 3D 视觉、自主路径规划、AI 识别近几年的技术突破则为协作机械臂的研发提供了更为有力的技术支撑。
技术的发展使得机械臂的应用场景随之拓展,需求的激增成为轻量化协作机械臂过去几年快速发展的原因之一。
其中比较有代表性的是新零售市场的发展。中国互联网信息中心数据显示,从 2013 年起,我国连续七年成为全球最大的网络零售市场。2020 新冠肺炎疫情爆发后,市场对于网络零售的依赖更是进一步加强。而网络新零售的形式,使过去生产制造业的「刚性自动化」遇到了挑战。
传统制造业的流水线依靠大量的机器设备完成生产,一旦市场需求、产品种类有变,硬件的更换成本非常高,并且严重缺乏灵活性。在新零售的发展以及疫情后市场需求不确定的情况下,无论是棉纱、钢铁、五金等工业品,还是服装等轻工业消费品,在订单上都呈现出来了小批量、多品类的变化趋势。通过小批量的订单来试产试销,在测试出市场的真实需求后,再进行大批量的生产。
在制造业的这一变化下,能够在小批量生产和大批量生产之间任意切换的「柔性化生产」需求增多,协作型机械臂的人机协作能力以及相对灵活的使用方式,使得它将比传统的机械臂更能适应新的生产需求。
除此之外,宋君毅认为,人才也是推动国内机械臂行业快速发展的重要因素:「现在在做机械臂的人,包括我自己,很多有国外留学、工作的经验。选择回国创业的,大家基本上都是有能力、有愿景的,在共同的努力下肯定能研发出更好的产品。」
03 未来边界
目前国内各家协作机械臂厂家面临着产品同质化严重、竞争愈发激烈的痛点,随着市场的发展,新一轮的调整已经到来。针对细分市场和应用场景的精细化开发,已经摆上机械臂品牌的日程。
施格自动化总经理张立认为:「即便是好的产品也不一定是适合市场的,如果说未来对机械臂提出了什么新要求的话,那就是要求机器人的技术发展一定要贴合场景的应用需求。」
「未来行业将逐步回归本质及产生各自细分领域的龙头企业,各产品线的市场将更细化。」宋君毅也持类似的观点,「今后只有将机器人技术与细分行业进行深度结合,才能创造出实际价值。目前我们已经在轻工业、商业、教育等具体行业内展开研发与适配。」
在工业应用中的码垛、搬运、分拣、焊接、喷涂等场景中,传统机械臂由于复杂的编码方式,往往需要专业的工程师花费数天甚至几个月的时间才能调试完毕。
「如果分别采购了不同品牌的机械臂,调试过程将更为复杂,不但要先对各品牌的设备进行调试,还要针对项目整体的联动进行调试,费时费力还未必能达到用户的心理预期。」张立告诉极客公园。
这其中花费的时间和人力对于大部分中小企业而言,成本过于高昂。
针对这一痛点,有像施格自动化这样的公司,研发出了「糖果系统」,通过平台级的系统,不但解决了不同品牌设备之间的链接、信息传输问题,在此基础上工程师还可以针对用户具体的需求进行二次开发,使系统、单一设备更贴合行业的使用需求。
大象机器人也在发力。「我们通过搭建自主的应用平台 myStudio,整合 myCobot 系列机械臂的软件资源和各类开发程序,方便用户进行系统更新维护升级,同时有充足的案例和开源代码分享,试图为用户打造一站式机器臂应用生态平台。」
而面向最近几年快速增长的消费级市场,面对着可能根本就不懂代码的普通消费者,协作机械臂的易用性更为关键,也更难实现。
「如何解决易用性的问题,这个是传统的机械臂很少去考虑的问题」宋君毅介绍道,「为此我们也花费了很多精力去改进。」
以大象机器人的六轴桌面协作机械臂为例,在其底端有一块四四方方的屏幕,屏幕下方有几个简单的按钮可以实现录制、保存和播放。用户使用唯一要做的就是点击录制按钮,然后按照自己的需要拖动机械臂,让它作任何你想让它做的运动,之后点击保存、播放,这时机械臂运动的轨迹就会完整复现。
再结合上协作机械臂末端采用的全球开放专利乐高孔设计,可以搭载各种执行器,实现手机的创意拍摄、物品拾取、码垛、分拣识别等功能。
开篇的「逗猫神器」也是这样简单实现的,只需在末端绑上逗猫棒,其他的均可一键完成,几乎没有技术障碍。
而乐高孔设计的底座也可适配各式移动底盘,搭载复合机器人,比如和移动执行器、小车、甚至是机器狗结合,从而实现协作机械臂的灵活移动。

为了让更多普通的用户也能上手操作机械臂,大象机器人制作了大量的视频教程。同时也为相对高阶的消费群体,保留了二次开发的可能。
通过研发一系列适配不同应用场景的套件套装以及多样化兼容拓展的接口,用户将可以对协作机械臂进行不同程度的改造,赋予机械臂更多的想象力。
「比如曾经有用户在协作机械臂的末端固定了一个激光的投影仪,再结合了三位点云生成,以及手势控制等技术进行二次开发,实现用手势控制机械臂的运动,并最终在墙上呈现出一个三维追踪影像。」大象机器人的员工介绍道。
「我很怕用户有了一个新奇的想法,但是却发现我们的机械臂无法帮他实现。」在宋君毅看来,协作机械臂应该更好地帮助每个人实现他们对生活的奇思妙想。
以目前的产品形态,对于完全没有自主开发能力的消费者而言,也够依靠「拖动示教」实现创意应用场景拖动示教,要想实现泡咖啡、叠衣服等复杂的操作加上一些代码就不是难事。在某种意义上来说,假如连普通消费者都能熟练掌握机械臂并能用它便利日常生活,这就真正实现了机械臂的普及。
帮助普通消费者更便捷地达成使用需求,和为极客们提供机械臂开发的基础平台,二者或许很难兼容,也很难实现,但也恰恰是协作机械臂未来发展的重要方向。当年的互联网、智能手机等产品从陌生到普及再到成为人们生活中一部分的过程,未必不会在协作机械臂领域重现。
*头图来源:视觉中国
本文为极客公园原创文章,转载请联系极客君微信 geekparker


