

我们到底应该如何与机器人相处?它们究竟将为我们带来什么?
在电影或是电视中,你是不是越来越频繁见到人形机器人作为主角登场了?
无论是《西部世界》还是《银翼杀手 2049》,是《人工智能》还是《我,机器人》,关于人类社会和机器人之间的关系的探讨,正不断从科幻片延伸到现实。
随着技术的发展,机器人离我们的生活越来越近。而在国内,作为服务机器人领域独角兽的优必选,正在这条路上越走越远,这家公司用三年时间迈出了大型仿人服务机器人的重要一步,在 2019 年 CES 展亮相的 Walker 新一代成为世界关注的焦点。实际上,研发大型仿人机器人的难度之大,在行业内早有共识。不论是日本从上世纪 80 年代开始研发的 ASIMO 机器人,还是波士顿动力在上世纪 90 年代开始研发的 Altas,都在这一领域深耕了 20-30 年,但直到现在,这些机器人距离我们的生活仍然很遥远,其中一个原因就在于成本高昂,迟迟无法量产。
相较而言,优必选在 Walker 机器人身上只用了近三年时间就让这款产品在硬件素质、运动能力及 AI 交互表现等方面有了显著提升。由于采用自主研发的伺服舵机、运动控制算法、机器视觉等技术,优必选进一步降低了机器人的成本,这也是让智能机器人能够走进家庭的重要因素。
在优必选 CTO 熊友军看来,优必选走上人形机器人这条路是必然的,并且优必选坚信人形机器人能够成为未来的家庭成员。
令很多人感到好奇的是,我们到底应该如何与机器人相处?它们究竟将为我们带来什么?在优必选看来,人形机器人背后究竟隐藏着人类怎样的憧憬?最关键的是,我们得做好哪些「必修课」才能让机器人真正成为人类的伙伴?这些问题的答案,或许优必选会比其他公司更加了解。

以下是优必选CTO 熊友军在2019 极客公园创新大会上的演讲内容(经极客公园编辑整理):
大家上午好!我是优必选 CTO 熊友军,我今天跟大家分享的主题是:机器人成为人类伙伴之前的「必修课」。
随着机器人技术和人工智能技术的发展,业界已经达成了一个共识,同时也产生了一个分歧。共识是机器人将会遵循个人电脑和智能手机的发展道路,成为生活的必需品,分歧是什么样的机器人将会成为我们的伙伴?
大家应该都知道工业机器人,那么工业机器人会成为我们的伙伴吗?工业机器人经常做着重复的体力劳动,很显然不会成为我们的必需品。还有特种服务机器人,也不会成为我们生活的必需品。那么什么样的机器人会成为我们生活的必需品?我想跟大家探讨这个问题。另外这些机器人会有哪些关键技术,以及我们应该如何实现这些技术?
在我的理解中,机器人应该具有两个属性:机器的属性和人的属性。机器的属性是机器人能够完成人类的一些工作,要求我们在设计机器人的时候针对具体功能进行开发,让它能够给我们做一些具体的工作,这是机器的属性。但是我们认为更重要的是人的属性,人的属性就是它应该具有人的智能,包括三个方面:感知智能、认知智能、运动智能。
所谓感知智能,是在机器人的研发过程中,我们会大量模仿人的智能,比如语音识别技术,让机器人和人进行交流和沟通,了解我们的意图。还有语音合成技术,让机器人更多地进行表达;同时还有感知,例如机器视觉模仿了人类眼睛的智能。当然这部分会涉及到很多算法,但是这些算法最终的目标是延展人的功能,以及人的感知器官能力。另外在认知方面,我们也一直在模仿人的认知能力。在运动控制领域也是如此。我们一直希望机器人可以像人类一样直立行走,为人类服务,不论是直立行走的能力,还是手眼协调的能力等,都涉及到运动的能力。
机器人成为人类的伙伴还有两个非常重要的功能,即可以作为人类和环境的接口。如果说机器人要和人进行交互,人形机器人无疑是最好的交互接口。首先,人形机器人具有人的四肢、外观、表情,和人交互时会有很多动作(拥抱、握手、招手),非常容易被我们理解。同时,人类的一些动作,可以非常方便地传达给机器人。
另外机器人也可以作为世界的接口,人类的环境绝大部分都是按照人来设计的,比如说环境中会有楼梯、斜坡、不平坦的路面,现在的轮式机器人、履带式机器人等实际上并不适合在这个环境里运行。
还有一点是,人类的很多工具都是专门为人类设计的。我们可以非常方便地使用这些工具,但是履带式、轮式、球形的机器人不适合使用这些工具。作为人类的伙伴,机器人必须在这个环境里很好地使用这些工具并进行工作,它必须要很好地适应这个世界。所以,我认为人形机器人应该是未来机器人发展的最终形态,是和人类进行交互最好的伙伴,也应该是服务机器人发展的终极形态。
我们可以回想一下人形机器人发展的简史,整个机器人的发展史也是人形机器人的发展史。上世纪七十年代,第一台人形机器人在日本的早稻田大学发布。在接下来的一段时间里,日本、韩国、美国、德国等很多发达国家,都陆续公布了自己的人形机器人计划,也取得了非常好的成绩。到现在为止,人形机器人还处于一个比较早期的阶段,距离大规模应用仍然有一定的距离。
人形机器人的发展简史也是人工智能发展的简史。在人形机器人发展的过程中,人工智能也经过了几起几落。最早出现的是工业机器人,做一些简单的重复劳动,但是随着人工智能的发展,人工智能的技术会逐步应用到人形机器人上,人形机器人现在已经融合了运动、感知技术、人工智能等技术,逐步走入家庭,成为我们生活中的一个小帮手。
同时,未来人形机器人的发展还会经历比较漫长的时间,我们初步把它分成三个发展阶段。第一个阶段是仿人阶段,也是整个行业和优必选目前所处的这个阶段,主要和两大技术有关,运动控制技术和人工智能技术。前者主要包括一些基本的运动控制能力,例如机器人在家庭中行走,或者通过手眼协调去抓取物体,但目前传感器是有限的,人工智能的技术也是有限的。
随着技术的发展,人形机器人将进入类人的阶段,它会有更多的运动能力,可以更好地适应我们的环境,包括可以适应不同的路面。在这一阶段,人形机器人具有高强度的运动能力,同时它的传感器也会极大地丰富,人工智能的技术也会快速地发展。之后会逐步进入更加丰富的阶段,类似于大家在《西部世界》里看到的机器人。
说到人形机器人离不开两类产品,一类是波士顿动力的 Altas 机器人,它采用了液压驱动的方式,机器人内部具有非常复杂的液压驱动的模块。并且,它主要用于军用领域,到现在为止,波士顿动力已经有 20 多年的研发历史。另外就是本田 ASIMO,这个项目实际上成立于 1986 年,到现在已经有了 30 多年的历史。ASIMO 应该是目前最接近我们家庭生活的机器人,本田 ASIMO 和波士顿动力 Altas 基本上代表了目前世界上人形机器人发展的最高水平。
优必选在 2015 年才成立了 Walker 项目,到今年只有 3 年多的时间。在刚刚结束的 CES 上,优必选大型仿人服务机器人 Walker 新一代首次在全球亮相,这款由优必选全自主研发的大型仿人服务机器人不仅拥有 36 个高性能伺服关节以及力觉反馈系统,还拥有视觉、听觉、空间知觉等全方位的感知,并实现了平稳快速的行走和灵活精准的操作,可以在家庭中提供服务。
总之,我们认为,机器人未来将会成为人类的伙伴。但有一个争议是,机器人有各种各样的形态,包括轮式的、履带式的、球型的,有的甚至是一个平板加上两个轮子,或者只有一个平板,然后让它的外观看起来像一个机器人。但我认为这种形态的产品只是目前人工智能和机器人发展的早期产物,最终的机器人的形态应该是人形,它会融入我们的生活,并被我们所接受。这是我非常核心的观点,也是对刚刚这个争议的回答。我们更期望人形机器人成为我们的伙伴,而不是其他形态的机器人。
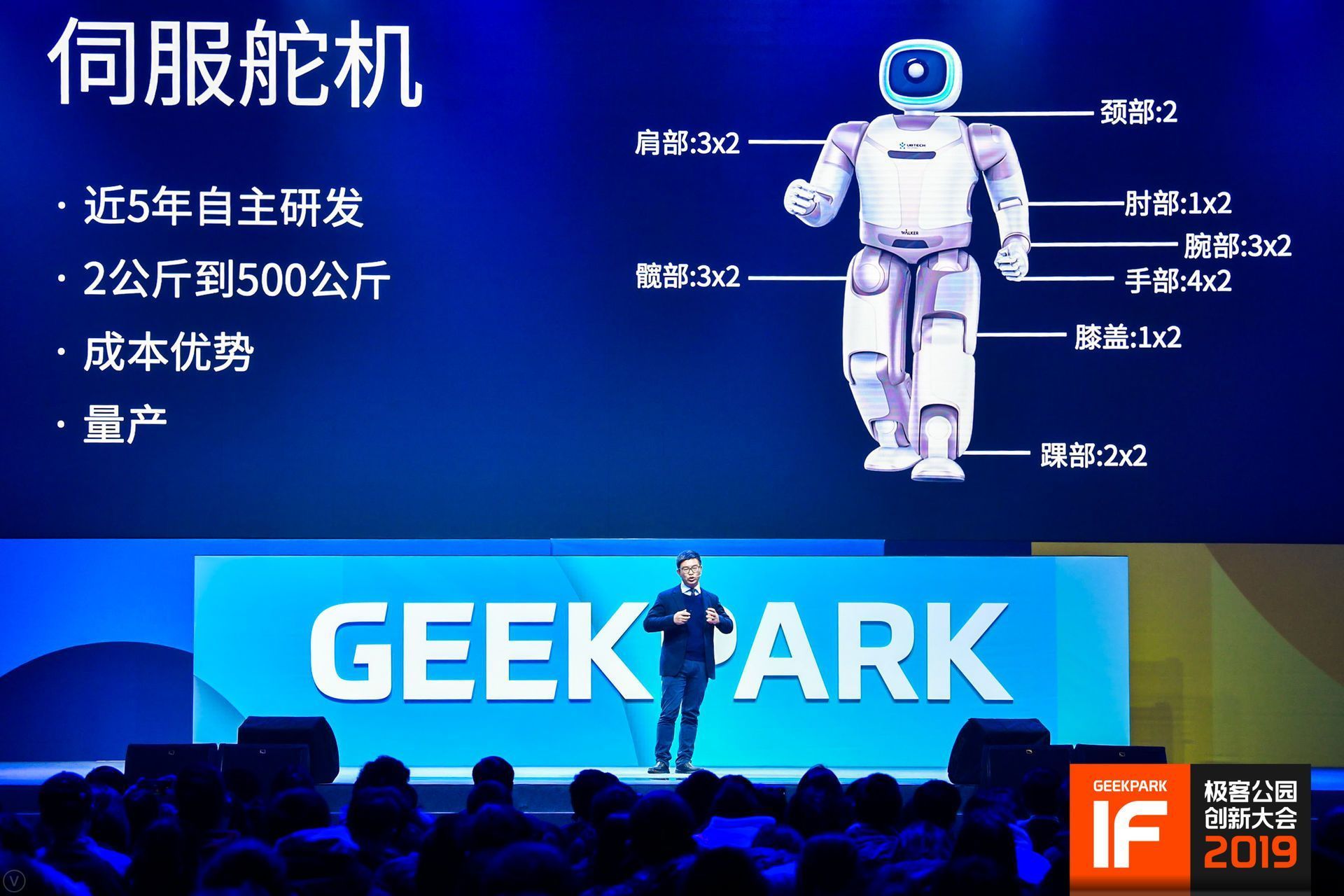
既然人形机器人是我们未来的伙伴,那么我们目前面临哪些技术挑战?挑战实际上主要来自于三个方面:运动能力、感知能力、认知能力。在运动能力方面,首先要解决硬件问题——舵机。一个机器人有非常多的关节,机器人越灵活,它的自由度越多,就需要越多的关节,而且不同位置的关节,力量、扭矩、精度、速度要求都不一样,所以研发一台完整的人形机器人需要非常多的关节。
从最小的两公斤的扭矩输出的手指的关节,到大扭矩的踝关节、膝关节,再到几百公斤的高爆发力的扭矩输出,对大型的人形机器人来说都是必不可少的。有了舵机以后,我们只是构建出了机器人的硬件,机器人要能够完成各种各样的动作,为我们服务,还需要运动能力。就像我们的足球运动员一样,即使他有强健的体魄,如果没有运动能力,他也不一定能踢好球。机器人也一样,你给它配置很好的硬件,但是它不一定能很好地完成工作,甚至直立行走都很困难。
所以,运动控制是其中非常关键的一环,我们在很早之前就已经开始进行运动控制技术的布局。在公司最早的可以直立行走的机器人上,我们做了运动学的建模,在此基础上搭建了第一个运动控制算法的平台。
接着到 2018 年,我们完成了第二个平台的搭建,通过这个平台,运动控制的技术、直立行走的技术得到了进一步的优化,机器人可以在各种不同的环境中行走,包括上下楼梯、走斜坡,可以适应各种不平的路面,甚至人去推它,它还会自动恢复。
今年我们又把大型仿人服务机器人做了进一步的升级,之前 Walker 只有可以直立行走的双腿,现在我们给 Walker 加上了双臂,也增加了柔顺控制。因为机器人需要与人互动,所以它的柔顺控制能力非常重要。出于安全性的考虑,机器人与人互动的时候不允许对环境或人造成伤害。这就需要它具备柔性安全交互,在运动过程中即使碰到人、桌子或椅子,也不会给人或物体带来伤害,同时也不会因此让机器人自身受到伤害,所以运动控制能力是非常重要的。
有了运动控制能力,就具备了基本的运动功能。如果想要机器人更好地为我们服务,实际上还需要视觉方面的技术。目前,机器人在视觉方面的工作主要集中在对人的身份、行为、情感的识别和动作行为识别等方面。比如机器人需要知道谁是爸爸、妈妈、爷爷、奶奶、哥哥、姐姐,然后针对不同人的身份,机器人可以采取针对性的沟通。
同时,机器人还需要知道沟通对象现在的表情,这就涉及到情感识别。不管你现在是高兴还是沮丧,或者惊讶,机器人需要进行识别,然后采取不同的沟通策略。同时在一些环境中,沟通对象现在是在开会,还是在休息,或是在锻炼,人形机器人也需要采取不同的沟通策略。所以机器视觉技术的发展非常重要,这个技术对于机器人可以在家庭为人类提供服务至关重要。
另外,机器人在工作时非常依赖于视觉去识别环境动态,例如,当我们需要它抓取东西、端杯水过来的时候,它需要知道水在什么地方、杯子是什么状态,是倒了、横着放还是竖着放的。机器人采取不同的运动规划,去规划它的手的行为是非常重要的。我想举一个手眼协调的例子,实际上优必选在研发手眼协调的技术之前,机器人经常会把杯子碰翻,如果杯子有一个把手,机器人甚至经常无法碰到把手。所以,机器人不仅要知道物体的位置,还要知道物体的状态、姿态,了解了这些信息之后,机器人要做路径规划、动作规划,以及手的规划,包括在做路径规划的过程中考虑会不会有桌子、椅子把它挡住,以及需要采取什么样的方式抓住杯子。
有了这些技术之后,机器人起码可以帮我们完成一些简单的工作,但是机器人在家庭中同时还需要有一些安全性的考虑。我们当然不希望机器人摔跤,而是希望机器人能够自己抵御环境的变化对它的影响。因此,我们需要用到平衡传感器、姿态传感器等,让机器人去实时感知它的状态、外力,采取保护自己的方式。当然,机器人也有可能会在大力的推动下摔跤,如果机器人在这个时候倒下来,我们希望它不会对环境造成伤害,所以它倒下的过程中采取一些保护自己的措施,比如说把胳膊收回来,做一些保护自己的动作,这些都有会有利于它保持平衡。
另外,在动作方面还具备柔顺控制,主要是为了让机器人在与人、环境交互的过程中是柔顺的,而不像工业机器人是刚性的。工业机器人在碰到人的时候可能会把人、桌子、椅子打伤,而我们服务型的机器人的关节都是柔顺的,确保在与人交互的时候比较安全。
它还会在家庭中大范围移动,例如从客厅移动到厨房,机器人需要知道目标位置在哪里、要从什么位置过去以及如何过去、在行进过程中有没有障碍物、需要参与什么路径,都需要经过视觉来建模,将家庭环境扫描,然后保存在自己的大脑中。它会知道冰箱在哪里、沙发在哪里、门在哪里,下次你与机器人交互的时候,它会根据保存在大脑中的地图,自动找到相关操作的目标、对象,去完成它要做的工作。
有了这些基本的技术之后,机器人需要有一个集成操作系统。PC 时代有 Windows,在移动互联网有 iOS 和安卓,机器人时代会不会有机器人操作系统?答案是肯定的。
优必选在去年 9 月正式发布了机器人操作系统 ROSA,除了用户决策、设备互联以外,ROSA 还集成了优必选这几年在运动控制、语音、视觉识别、定位导航等方面的技术,能够大幅提升机器人开发的便捷性,降低了开发的难度。
有了操作系统之后,机器人可以进行多模态的交互。这种交互方式有别于 PC 的单模态交互,也有别于现在智能手机的语音、视觉、触摸屏的交互方式。在机器人上我们更多强调的是有动作、姿态、表情的自然的人机交互方式。
以上是机器人成为人类伙伴之前需要解决的关键技术和基础资源,我们相信随着这些技术的进步,机器人会逐渐成为社会生活的必需品,发展为庞大的产业,业界对此已经达成共识。孙正义曾说未来 30 年内,智能机器人将达到 100 亿,那时人类也将达到这个数量,这预示着一个规模巨大的产业的到来。
我们也可以预测机器人将会作为一个智能终端进入家庭,它会成为第三代人机交互中心。第一代人机交互中心是 PC,第二代人机交互中心是智能手机,我们认为第三代人机交互中心会是机器人,因为机器人有各种各样的传感器,有动作、表情、AI,和人的交互更主动,这种多模态的交互非常方便、自然。人传递给机器人的信息可能只有一个表情、一个动作,机器人就能够明白我们是什么意思,机器人传达给我们的信息除了语音、图片和文字以外,可能还有它自己的表情和动作。
所以,我们认为人形机器人将会成为第三代人机交互中心,成为消费级的智能终端,但是我认为人工智能与机器人行业现在还处在早期阶段,需要一步一步来。人类经过了 7 万年的演化才从猿人变成人,机器人也需要一个演化过程,但时间会比人类的演化要快。我们相信人形机器人最终会成为人类的伙伴,走进千家万户,真正成为生活的帮手,让我们的生活变得更加便捷、智能、人性化,谢谢大家!


