

自动驾驶临近拐点的征兆有两个,其中之一在于,有人找到了仅靠技术创新就能将成本降低一个数量级的方法。
「自动驾驶临近拐点的征兆有两个,其中之一在于,有人找到了仅靠技术创新就能将成本降低一个数量级的方法。」在险峰长青名为《从产业终局看当前自动驾驶的创业机会》的产业报告中曾这样描述。
这样的团队在 2017 年已经开始萌芽,2018 年得以初露锋芒。近日,中国无人驾驶团队 Roadstar.ai(星行科技)正式对外发布了其面向 L4 级的无人驾驶解决方案——「ARIES·锐」。

Roadstar.ai 创始人兼 CEO 佟显乔
「整套方案的落地价格不超过 30 万人民币」,Roadstar.ai 创始人兼 CEO 佟显乔站在演讲台信心满满地说道。活动现场,台下不仅有极客公园在内的数家科技媒体,还坐着 Roadstar.ai 最新一笔 A 轮 1.28 亿美元融资的主要投资人,领投方双湖资本和深创投、跟投方招商国际等。
这轮融资被视为国内无人驾驶领域的最大一笔,体现出资本市场对Roadstar.ai团队创新技术的信任和认可。

Gartner2017 新兴技术曲线
与当下动辄百万元的主流方案相比,Roadstar.ai 给出的 30 万元价格颇具吸引力。在 Gartner2017 新兴技术曲线上,无人驾驶位于第一段上升期接近顶端的位置,处在「过度期望的峰值」区域,预计成熟的时间超过 10 年,而逼近拐点的动力之一就在于成本能够有实质性下降。
如今,Roadstar.ai 分别在加州和深圳完成了多轮路测,包括在日夜、雨晴等多种天气环境,红绿灯、斑马线、中途超车等多种路况下,车辆均能够实现平稳行驶。
在加州,Roadstar.ai 可实现平均一月一次人工干预运营;在国内,可实现高复杂城市路况环境下连续数小时无人工接管的运营。
还能够更便宜?
当下,在通往高级无人驾驶的道路上,来自技术层面的最大挑战仍在于核心传感器——激光雷达价格居高不下。很长一段时间里,业界普遍认为,L4/L5 级无人驾驶方案不能没有激光雷达,尤其是高线束激光雷达,这同时意味着整套无人驾驶方案的成本将在百万元以上。
尽管核心主导者 Velodyne 等公司在不遗余力地推动该品类的量产化,但成本下降的前提仍然是无人车的大规模应用。这看似是一条不断循环的漫长道路。
庆幸的是,我们从来不乏善于打破常规的革新者。
在 Roadstar.ai 的锐方案中,墨守成规的「64 线激光雷达方案」影子不再有,取而代之的是纯国产品牌方案。

Roadstar.ai的L4级无人驾驶硬件方案平台
团队使用四枚速腾聚创 16 线激光雷达和一枚禾赛科技 40 线激光雷达组合以达到 64 线激光雷达的效果;同时,配合低成本摄像头、毫米波雷达、GPS&IMU 系统构成一套完整的技术解决方案——也就是我们在路测车上常看到的「机顶盒」设计。
和上一代主流的多传感器解决方案相比,锐体现出较大的成本优势和稳定性。首先,采用多枚低线束激光雷达融合达成多线束激光雷达的探测能力,在效果相近的情况下有效地降低了成本。
在 Roadstar.ai 战略副总裁那小川看来,「无人驾驶方案综合成本可以比照普通司机的三年工资,中国司机十来万元一年,所以成本至少应该控制在 40 万元以内,不然再好的方案也没有意义。」
更进一步,基于 Roadstar.ai 采用的多枚激光雷达设计,能有效防止因单枚激光雷达宕机后导致的自动驾驶系统失效情况。而在此之前,冗余方案设计的重要性已经被 Uber 等多起无人驾驶事故验证。
能够选用如此大胆的硬件设计方案,同时在较少量的路测数据情况下宣布 L4 无人驾驶方案的落地,其杀手锏还在于团队数据利用思路的另辟蹊径,软件及算法层面的实力。
众所周知,在采用激光雷达、摄像头等多种传感器的硬件平台基础上,数据融合是基本思路。但不同于常规的后融合思路——即各类传感器给出识别结果后系统按权重进行判别处理后再融合,Roadstar.ai 采用了前融合技术。
即将多种传感器采集到的原始数据直接汇聚到计算核心,基于端到端的深度学习算法进行识别和深度融合。与此同时,为解决多个传感器数据在时间和空间上精准对齐的核心难题,Roadstar.ai 提出了 HeteroSync 异构传感器同步技术及 DeepFusion 深度融合算法。
在自动驾驶数据集 KTTI 上,Roadstar.ai 已经凭借 DeepFusion 技术长期占据多项任务的前三名。路测证明,在 DeepFusion 的支持下,Roadstar.ai 的车辆在没有 GPS 信号的地下车库中,也可以做到精准的定位。
一年内的成绩单
据团队透露,Roadstar.ai 已经和日本、欧洲、美国等地的合作方进行了洽谈,包括世界顶级的公共交通运营商、Tier1 厂商等,近期还将公布和日本某车厂的合作项目。
在接触过全球各地的无人车团队、车厂、OEM 厂商后,那小川表示,「中美处于这个领域中的第一战队已经是毫无疑问的事实,而相比相对落后的日本、欧洲等地区的第二梯队从业者,前者最大的区别在于推动无人驾驶这件事的主心骨在于科技公司,非传统造车势力。」这个层面的认识为 Roadstar.ai 团队增添了一份额外的民族自豪感。
在具体执行力上,Roadstar.ai 过去一年的高速成长则是最好的体现。
据那小川回忆,2017 年 5 月公司正式落户深圳,当时团队一共四个人,CEO 佟显侨、CTO 衡量、首席科学家周光集中在硅谷进行研发,他一人在深圳筹备融资等前期事项。
当年 6 月,公司召进第一批技术员工,随后中美两地团队配合便开始加紧推进对 HeteroSync 和 DeepFusion 算法的验证。继在美国先后完成在日夜、雨晴等多种天气环境,红绿灯、斑马线、中途超车等多种路况下的测试后。
2018 年 3 月下旬,Roadstar.ai 开始在深圳市区路段进行路测,路测总长度为 10 公里,耗时 25 分钟。
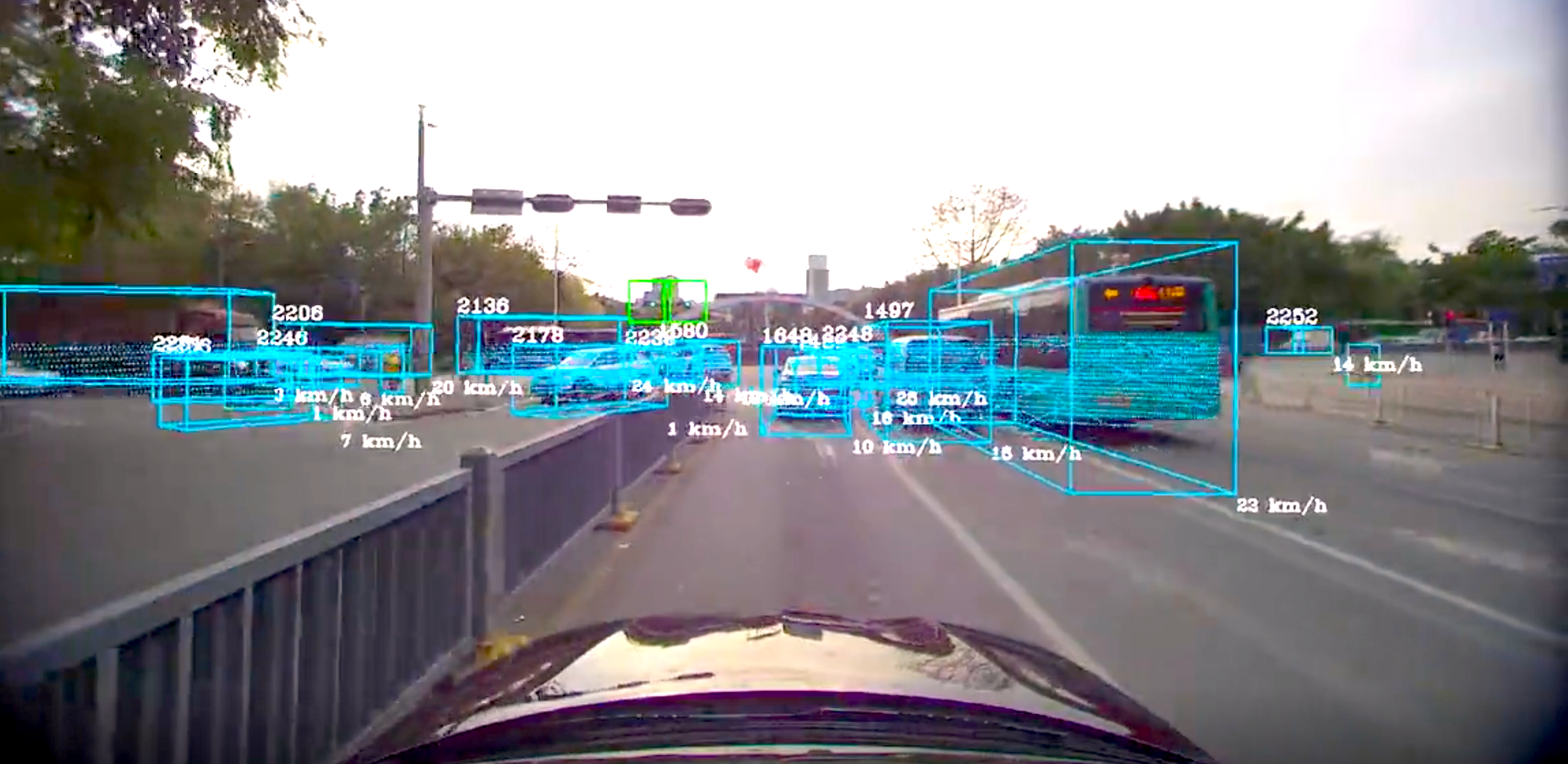
Roadsta.ai路测实时识别效果
据当时参与路测的媒体表示,「测试车辆平均车速保持在限速上限,途中经历多个红绿灯、斑马线、还遭遇了外卖小哥电动车突然超车的突发情况,测试车均成功避让。在试乘期间,在距离红绿灯 150 米远的地方,测试车的点云阵已经标出了红绿灯所在之处」。
在技术快速推进的背后,有着团队对于更高目标的认同——Roadstar.ai 不仅是一家单纯的技术提供商,还将参与到运营服务环节。
第一步,在今年,Roadsta.ai 计划在深圳部署 50 台无人专车。「如果政府允许,将提供给一般消费者进行测试,如果不允许,选择通过安全员进行一定范围内测试,提升算法。」佟显乔说道。
后续两年,Roadstar.ai 计划将车队规扩大至千辆,无人驾驶方案成本控制在 5 万元以内。然而,看上无人车运营商的生意不止 Roadstar.ai 一家,在过去的两个月里,滴滴已经联合十余家车厂进行布局。
当被问到如何面对滴滴等巨头的竞争时,「我们相信技术稀缺性的价值,这也是 Roadsta.ai 存在的意义。」在那小川看来,30 万元做到 L4 级无人驾驶已经是最好的谈判筹码。
实际上,从无人驾驶技术商转向运营商的模式原型来自硅谷:Waymo 最开始在凤凰城测试无人驾驶技术;随后向凤凰城居民免费提供网约车服务,用户同样可以通过 App 进行预约。
另一方面,团队承认当下的 L4 级无人驾驶仍然无法做到绝对安全,解决方案即在加入远程控制中心服务进行人工干预。团队透露,近期正与中移动等通信运营商进行沟通,「中移动已经能够实现在上海远程控制北京车辆」。
不一样的「百度系」
作为中国无人驾驶主力军中的一员,Roadstar.ai 体内同样有着「百度系」的基因。
2016 年,正是因为百度工作的契机才让三位主创团队聚集在一起。当时,三位年轻人在位于硅谷 Sunnyvale 的百度「美研」并肩而坐,同属于百度无人车团队,工位相邻。
不过在那小川看来,团队成员在百度的工作普遍时间不长,其技术延续性很少,更大的优势还在于多家全球领先科技公司的研发经验和技术积累。
这一点,在团队采用了与百度等主流方案较大差异的「前融合」路子里可见一二。Roadstar.ai天使投资人云启资本陈昱曾评价,「团队技能分布较平均,几位创始人曾分别供职于苹果、英伟达、特斯拉、谷歌等公司,在一线自动驾驶上积累了工程方案经验,迅速完成了知识的原始积累。」
在创办 Roadstar.ai 之前,CEO 佟显乔曾就职于苹果特殊项目组(无人车研发)和 NVIDIA 自动驾驶算法组,CTO 衡量曾则在特斯拉 Autopilot 组、Google 地图街景图工作,周光曾在 2015 年大疆全球开发者大赛第一名。
作为佟显乔本科时代「睡在上铺的兄弟」——那小川,此前在华兴资本担任投资总监,随后应「兄弟之邀」加入 Roadstar.ai。
在团队分工方面,佟显乔主要负责全局,把握公司的整体发展方向;衡量主导总体架构和技术研发;周光负责传感器融合、感知和深度学习。那小川基于多年的创投工作工作经验,主要负责公司战略决策及融资等事宜。
从 2014 年,无人驾驶技术在国内逐步兴起;到 2017 年上升至全民高潮的议题,无人驾驶领域已经诞生了数百家创业公司,而 BAT 等互联网巨头也先后入场;很多人相信,在 2020 年或者不远的将来,我们终会看到无人驾驶时代的到来。
身处在百家争鸣的无人驾驶商业化前夜,技术方案和落地路线更异,然而前路仍然谈不上光明。留给革新者的挑战还很多,更优方案的落地意味着更多机会,同时也意味着需要肩负起领先者的压力和速度。


