

当「低速无人驾驶更容易落地」成为公开的秘密,这个圈子里还有哪些新鲜事?
2017 年 9 月初,酷哇机器人(COWAROBOT)上海办公室接到一通来自长沙的电话——对方表示对其低速无人驾驶方案很感兴趣。
电话来自于中联重科环境(以下简称中联环境)——国内最大的环卫、环保装备制造商,每年全国超过 70% 以上的环卫清扫装备由这里输往全国各地。
随后,中联环境针对酷哇机器人的团队和技术平台进行了长达的 4 个月考察和评测。12 月底,漫长的决策期结束,双方的合作意向最终敲定。

无人驾驶扫地车实拍
今年 4 月,由中联环境与酷哇机器人共同开发的无人驾驶清扫车正式亮相长沙橘子洲头公园,并现场展示了清扫车适应于多路况清扫任务、动态路径规划等功能的实测效果。这让酷哇机器人的团队颇为激动——率先成为将量产的低速无人驾驶产品带入市场的创业公司。
更为重要的是,这家成立于 2015 年 8 月的机器人技术团队在四年的商业化探索之后,终于在行业领域找到了更为明确和清晰的商业化方向。
早在日本东京工业大学攻读博士时期,创始人何弢就将论文方向锁定为「特征驱动全局定位系统」——一项在非理想弱 GPS 环境下无人驾驶的核心技术。在他看来,这些年沉淀下来的技术经验和行业理解力将是团队稳健发展的核心。
抢位
对于一家想要落地传统行业的创业公司而言,绑定龙头企业是十分必要的手段。
中联环境,隶属于工程机械领域 A+H 股上市公司的中联重科旗下,主要从事城市环卫及污染物治理等技术研究,以及装备研发、制造和营销的完整链条。
在环卫产业领域,中联环境有着天然的渠道资源优势,同时也是被政府认可和信赖的品牌。这艘大船顺势成为希望进入环卫场景的自动驾驶技术方案商的必争之地,这其中不乏国内最大的自动驾驶技术平台公司。

酷哇机器人(COWAROBOT)创始人兼CEO何弢
「老实说,市面上已有的方案他们(中联环境)都接触和评估过,包括部分友商还在不断寻求合作的可能。」喝着水的何弢不疾不徐地说道,似乎对于赢取到合作订单的结果成竹在胸。
这次项目采取非公开招标形式,但中联环境并没有因此而马虎,光是对于酷哇项目的沟通和决策周期就长达四个月。
「采取公开竞标的方式会更简单一些。但这种探索性的合作项目需要对于合作伙伴更深度的观察」。一位同样在传统产业开展无人驾驶项目的负责人说道。实际上,结合环卫产业的发展瓶颈和趋势来看,这更像由领头羊角色开启的一场主动变革。
在无人驾驶技术方案的考察过程中,测试实体的完整度是中联环境首先考察的指标,「他们要看到能够跑起来的真车」。此外,能够跑通园区场景的成熟方案也是必要条件。「测试过程中,他们始终跟着无人车,跑完了整个封闭的工业园区。」何弢回忆起当时的场景。
如果说前两项考察都是必考题,酷哇则是被幸运击中的考生,「我们的低速场景下的无人驾驶标准方案已经在实际应用中得到验证」,这背后是酷哇早期面向消费者市场的自动跟随行李箱、与某上市公司合作的快递物流机器人两大项目的落地和探索。
顺利通过基础能力的考核,接下来双方探讨的核心包括环卫产业的理解,以及方案商对于自动化作业的重要程度。「这个过程里没有要求展现过多实际的案例,主要是逻辑和方案思路的梳理。」
任何一项技术一旦落地到行业里,就只能让位其主角的身份,踏实地扮演好服务赋能的配角。被无线光环环绕的无人驾驶亦是如此。
「如果只是让环卫车变得无人驾驶并没有多大价值,更重要的事在于——通过无人驾驶的手段让环卫车成为更加高效和安全的智能清扫车。」何弢谈道。

无人驾驶状态下行驶
在城市环卫场景下,理想的智能化清扫方案应该是这样一幅画面:在固定的清扫车归位处,五六辆大小不一、形态各异的清扫车如同站岗的哨兵整装待发。

清扫车自动避障绕障
固定时钟敲响,清扫车车队先后轰轰作响地出发,通过抓取道路中的特定建筑作为参照物,比如,马路牙子,地标楼宇等,沿着预定的基本路线前行。

与此同时,通过识别树叶、冰雪等垃圾目标物,清扫车能够及时调整清清扫路径和清扫模式等行为,比如,针对垃圾量大的区域加大作业功率;为了在既定续航时间内清扫更多区域,其中还涉及到作业能效优化的决策。

清扫车自主学习清扫路径
最后,清扫车完成清扫任务回到既定的归位处,由人工进行垃圾的转运,为清扫车充电、检修等维护工作。
走完整个评估和沟通过程,就何弢的观察和感受而言,中联环境作为一家扎根于传统行业的巨头公司,在挑选技术方案商时,更侧重于其后期的配合力度和配合意愿。
此外,据酷哇方面透露,在低速自动驾驶场景中,技术需求方与供给方在技术层面容易出现分化的关键点在于——弱 GPS 环境下无人驾驶的运行能力。
考虑到城市道路的复杂情况,无人车穿梭于大街小巷间,其周围的环境一直处于高度动态中。同时,因为处于近地面状态,GPS 信号非常容易受到阻挡。
这背后需要两个关键技术进行支撑,其一是特征驱动的全局定位技术,所谓特征驱动,即看到环境中的特征物体,便能够清楚知道所处在环境中的哪个定点位置,这和人通过标记点记住路线的道理十分相似。
其二,即是动态的路径规划。低速无人驾驶场景的特殊之处在于——城市中的毛细血管道路是缺少道路股则的,不能像在标准公路中通过辨识车道线或者人行道来辅助判断。在这种特殊道路环境下,车辆基本上处于一个相对无序的状态。
这两项关键技术成为低速场景下无人驾驶场景的最大挑战,同时也是其技术门槛所在。
「我们一直做这种特殊场景下的低速场景,最开始从消费场景切入类似环境下的垂直场景里,这些场景里都充满着以人为主的活动,刚好是我们的强项。反而,面向乘用车和高速道路的方案商不能胜任。」何弢认为酷哇的技术差异化优势也在于此。
变革
过去几年里,环卫产业经历了从人力化向机械化的变革,发展速度基本呈现井喷式的势头,但瓶颈限制也一直伴随左右。
参考《2015 年中国城乡建设统计年鉴》,到 2020 年中国环卫服务总体市场规模将接近 1700 亿元,复合增长率达 6.8%,其中道路清扫保洁服务规模为 1266 亿元。
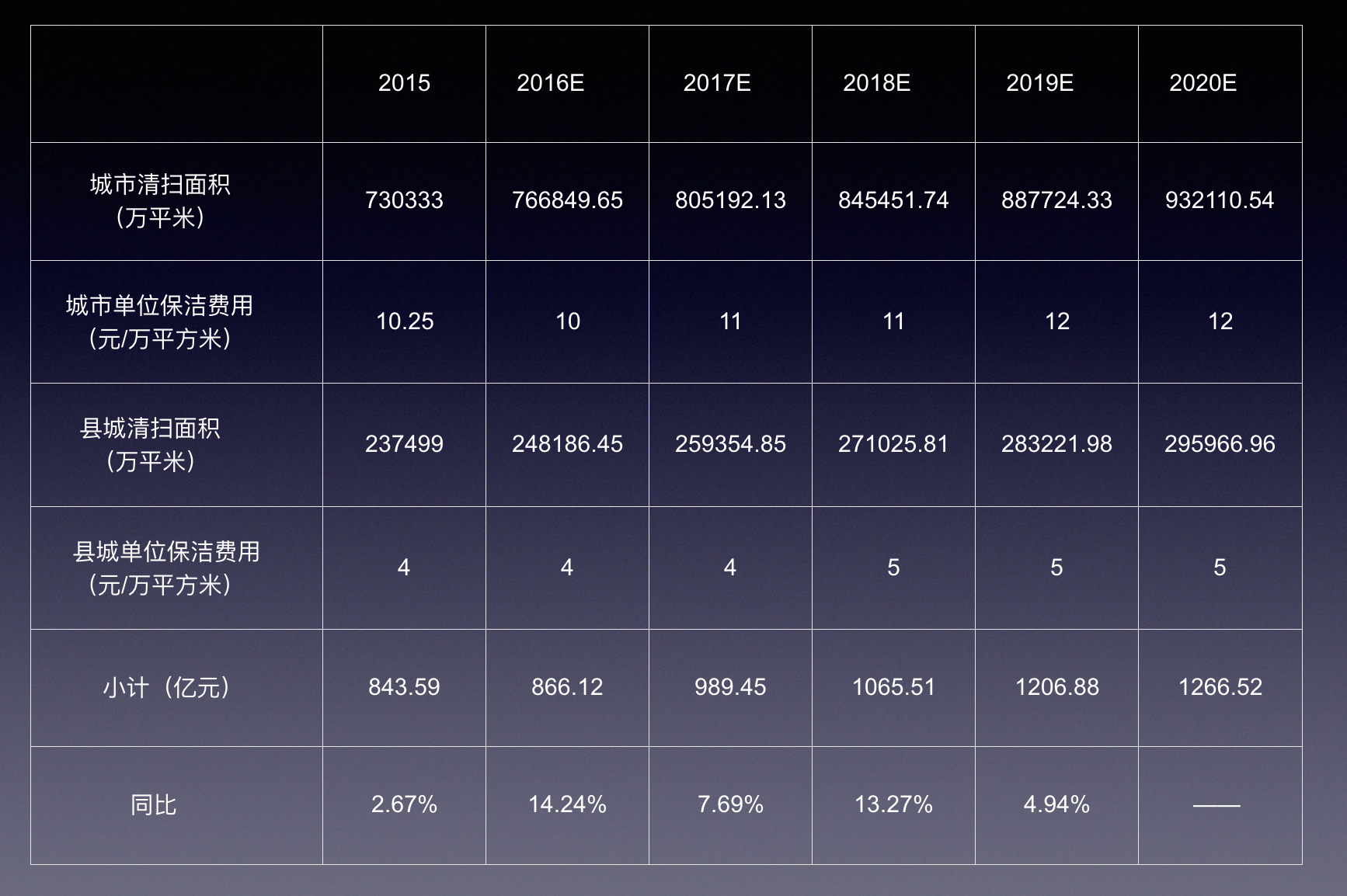 《2015 年中国城乡建设统计年鉴》统计数据
《2015 年中国城乡建设统计年鉴》统计数据
在这背后主要有两股推动力量。一方面是「美丽中国」的政策落地后,政府一直大力推动;一方面随着城镇化水平的不断提高,从一线城市到二三线城市,城镇地区的市容市貌水准要求也在不断提升,与之相对应的环卫保洁需求和力度随之加大。
但在拥抱巨大机遇的过程中,中联环境也不得不先解决一个巨大的社会层面难题——劳动力短缺。
「这行很难招到人,并且现有的劳动力结构也有问题,完全跟不上新增市场的速度」。从业人士感慨道。
在不断新增的订单中,中联环境意识到了供过于求的增长矛盾点——买来了大量设备却招不到足够的人员去运维,即将威胁到销售环节。
在这样的市场背景下,直接从机械化迈向机械自动化 3.0 时代的步伐开始加快。市场需要的不仅仅是机械化,而且是要自动化。
今年,中联环境的业务战略进行了重大转型,在出售设备之外,同时将开始切入服务行业。这个转型的重要意义之处在于,中联将由一家设备出售商转型到设备运营商。
「他们急需寻找到一个利益与效率的平衡点——在成本空间有限的情况下实现更高的效率,无人驾驶是最好的方案。」何弢谈起自己的理解,这样也就不难理解为什么合作推进的最大动力来自于中联环境。
参考公开数据,在环卫产业的生态链中,机械设备及耗材仅占到 32% 的市场份额,剩下超过一半市场由环卫服务构成。
在何弢看来,本质上,无人驾驶技术的落地是对人工服务进行一定比例的替代。在已经从纯人力过渡到机械化的前提下,参照工业 4.0 的标准,智能机械自动化的人员替代比例能够达到 50%,也就是说一个清扫队能够缩减一半的人力。
换句话就是说,「68% 的市场份额里,肯定可以占到 32% 以上的替换比例。」何弢肯定地说道。
此外,结合环卫服务行业每年正在以 10% 以上的速度增长,「未来这将是一块千亿级的市场」。
从无人驾驶到无人清扫还有几步?
「谁更懂环卫车?」「谁更懂智能清扫作业?」
答案不会是自动驾驶技术团队。区别于闭门造车的方案,何弢认为,必须和设备制造商站在一起,「我们的信心在于对清扫作业的自动化、清扫车无人驾驶整体把控。」
基于更早启动的物流机器人项目——低速场景下自动驾驶平台基础,酷哇和中联环境的合作主要围绕自动化作业层面展开,包括垃圾的追踪定位;清扫模式的选择;清扫路径的规划,是沿着马路牙子一直清扫,还是大幅度的左右来回清扫等最优能效的管理。通俗来说,就像是一个放大版的巨型扫地机器人。
在实际应用场景中,无人驾驶环卫车最终要落实到执行清扫作业,而基于无人驾驶的框架去构建出一套智能清扫作业系统,并将智能控制系统和车体本身打通,产品方案才算饱满。
有时,中联环境来到上海与酷哇团队进行沟通,但大部分时间双方的合作在长沙进行。「在长沙,我们部署了一只十余人的团队,在中联长沙总部的办公室里设有酷哇员工的工位。」
酷哇的自动驾驶研发团队主力来自于上海交大,也就是何弢的母校。这两年,酷哇从互联网巨头公司、CMU 等再吸引了一波新鲜力量。
从去年底正式立项距今,5 个月时间过去了,双方的合作成果已经正式出炉——可进行全路况识别和清扫、路径规模的无人驾驶环卫清扫车。不过,何弢直言,「这还是测试版」,接下来的半年时间里,双方将在上海、长沙、芜湖三地同时落地测试。
位于虹桥的北斗产业园里,已经上岗一辆无人驾驶清扫车。不过,测试重点还是落在长沙,在橘子洲头已经部署三辆车,同时,出于改造阶段的还有两辆车,其中一辆是卡车体积的重型清扫车——仍采用低速作业模式,功率和续航时间更长。
在长沙,测试将以一个车队的形式展开作业,在今年 6 月份正式完成。「主要是考虑不同作业车的协同性」。更进一步,何弢表示,后续还将推出带有机械臂的清扫车。
在无人机驾驶方案层面,清扫车采用激光雷达、毫米波雷达、摄像头、超声波雷达等多传感器融合的方式,同时配合增稳后的底盘运动执行策略来跨越或绕过障碍。
当下,激光雷达仍是制约无人驾驶方案成本的最大因素,酷哇方案中选用三颗激光雷达方案。解释原因时,何弢谈到,方案的选取是从需求倒退回来的,单纯无人驾驶方案两颗雷达能够完成任务,但还有智能作业的需求,包括对于特征物的识别跟垃圾的追踪。
目前,展馆、物业、机场、公园、厂区等五大片区将会是酷哇重点关注的低速无人驾驶落地场景,其场景共性包括以低速运行车辆、人类活动为主,运行车辆速度控制在 20km/小时以下。面向行业的业务中,聚焦在物流与环卫两大方向。
更重要的事
谈到未来无人清扫车的智能化方向,何弢透露,酷哇与中联环境正在共建有一个数据中心,这里搜集有清扫车在不同场景中积累的作业数据。
比如,针对不同季节、不同时间段、不同路段的垃圾分布情况进行精细化,以助于进一步提升和优化作业模式,比如,通过增减单位清扫力度,比如将原来需要两台设备要覆盖的清扫面积,经过优化到可能一台清扫设备就足够。
2016 年,酷哇机器人项目作为芜湖市政府招商引资的机器人项目入驻,政府同时资助了工地和厂房等资源。如今,酷哇的生产线集中在此,包括早先偏向智能硬件的智能跟随行李箱项目,以及涉及到低速自动驾驶的整套核心零部件也将是这里组装完成的。
「在芜湖完成组装和测试,然后再发到各个地去做前装或者是后装。」何弢认为这将是酷哇批量化的有力保障。
从最初的智能跟随行李箱,然后到物流无人车项目探索,以及无人清扫地车项目落地,酷哇走了一条「非典型化」的产品路线。
「我们内部是有个原则说是做『做三年减的产品,布局三年加的技术』,」何弢谈到其背后逻辑时说道,酷哇一直在追求的是,做能够实际落地的产品和看得到的时间技术布局。
「3 年减」的产品,即意味着三年以内,能够真正落地规模化的才会去做;「3 年加」的技术,就是说持续在三年能够体现出竞争力。
谈到谷歌 Waymo 等美国自动驾驶先驱者时,何弢表示,最值得借鉴之处在于,他们的节奏更为稳健,一直处于相对客观和理性的态度,而这背后是需要对于行业具备足够深刻的理解力,
另一面,酷哇针对消费者市场的智能硬件事业部还在有条不紊地运作,每月智能行李箱出货量能维持在 2000 只左右,一年下来能保证 6000 万左右的营收。
「单靠无人驾驶业务支撑整间公司的运营存在一定风险,两条腿走路更稳健些。」何弢说道。

(扫描二维码详细了解 thinkplus 高效能方案)
我们将那些改变了世界和历史的商业势力称之为「酷」,而我们更愿意相信那些即将决定未来世界的公司一定会做到「更酷」。极客公园同 ThinkPad 一起,推出酷公司 100 计划,并提供给未来的「酷公司」们 thinkplus 高效能方案,助力企业高效成长。让「酷公司」更加有力,让他们成为我们对未来世界不可或缺的美好想象。



