

用柔性材料做成的器件可在外部刺激下变形,并可在外部刺激撤除后自动还原。
触觉是我们人类的一大感知功能,用手触摸就可以感知物体的三维形态,并透过柔软的皮肉无损操控物体。那么,机器能不能用类似的方式工作呢?
据外媒报道,加利福尼亚大学圣地亚哥分校的一个工程团队近日发明了一种柔性机器人抓手,可以通过触摸来构建物体的虚拟 3D 模型(也就是感知到物体的三维形状,不管之前熟悉不熟悉),并使用可充气的「手指」操控目标物体。这意味着,即使在黑暗环境中,该机器也可以正常工作。
这种机器人抓手拥有三根表面覆盖「感测皮肤」的气动「手指」,「感测皮肤」由具有嵌入式碳纳米管的柔性硅树脂组成。
当与物体表面接触时,「手指」内的空气在接触位置增压,压力的增加导致该区域「感测皮肤」中的纳米管的导电性改变,一系列电信号从手指传输到创建虚拟 3D 模型的控制板。通过这种方式,物体的形状就被「感觉」到了。
物体形状被「感觉」到后,机器人抓手就可以抓住并操纵它了。通过选择性地对「手指」内的「空气室」充气,这种机器人抓手甚至可以装卸灯泡。
用柔性材料做成的器件可将光、电、热、湿度等外部能量直接转化为器件本身的机械变形,并可在外部刺激撤除后自动还原,近年来受到了国际学术界、产业界的越来越多的关注。目前用柔性材料制作的双层结构驱动器已经可以实现弯曲、扭曲等变形形式,被应用到了仿生机械手、爬行机器人等领域,上面介绍的这项发明就在此列。
不过,柔性材料在快速大变形、多刺激源响应、模拟跳跃、飞行等复杂动作方面的发展还面临许多挑战。
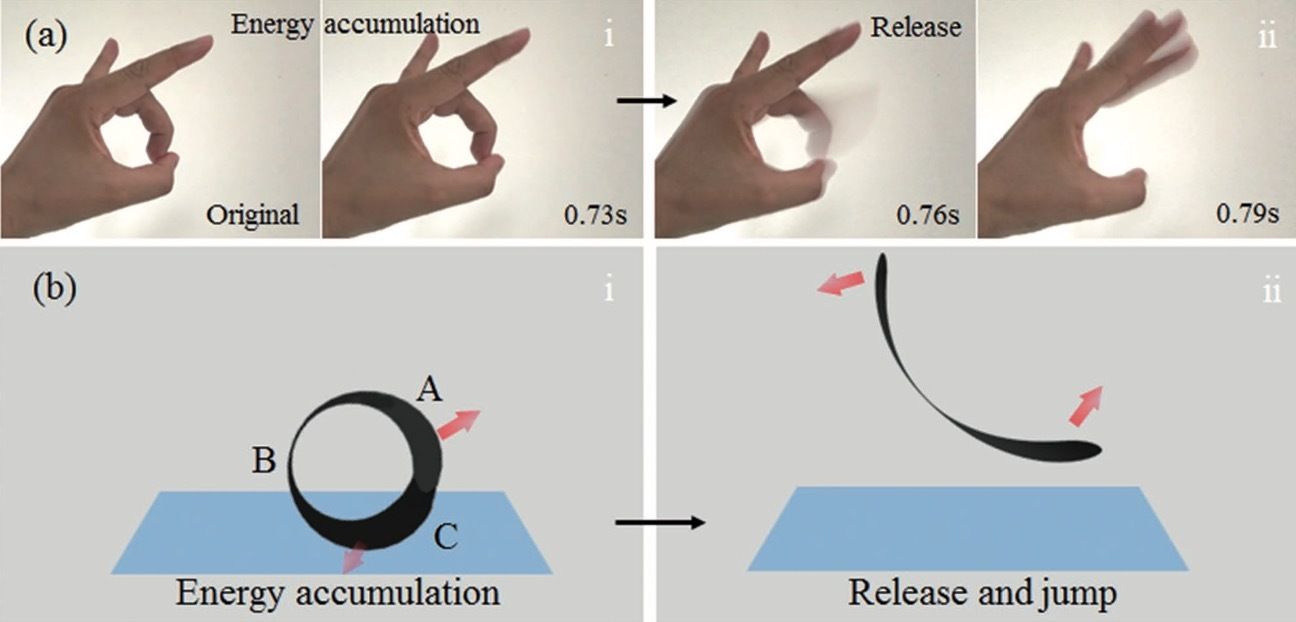
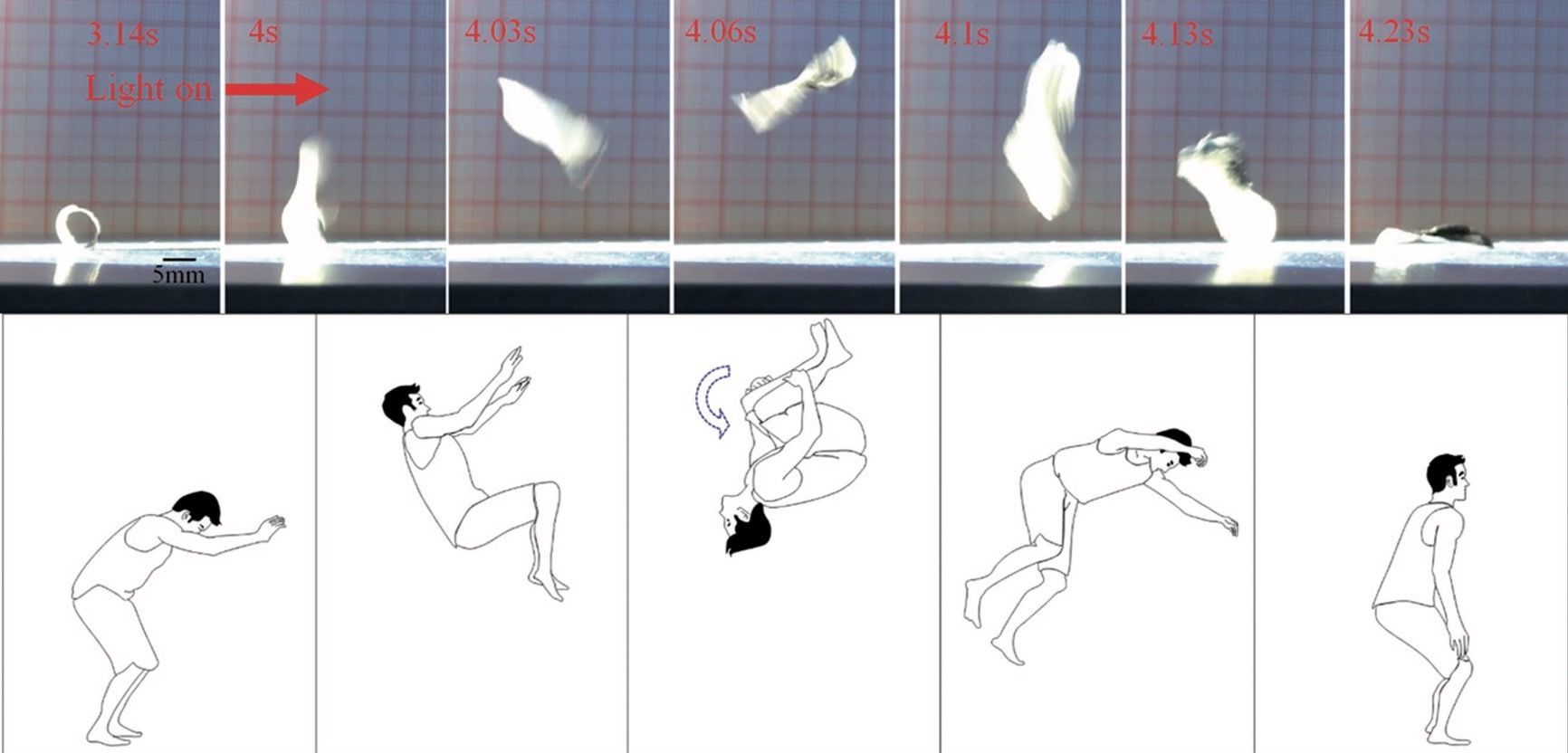
其实,我国学者在柔性材料方面已取得不少进展。据国内媒体报道,近期,合肥工业大学与中科院苏州纳米技术与纳米仿生研究所合作,研发出了一种模拟人类「弹指」动作的新型光驱动「跳跃机器人」。这种「跳跃机器人」在接受光线照射后,可跳跃至自身高度 5 倍以上,并在空中做出翻滚动作。
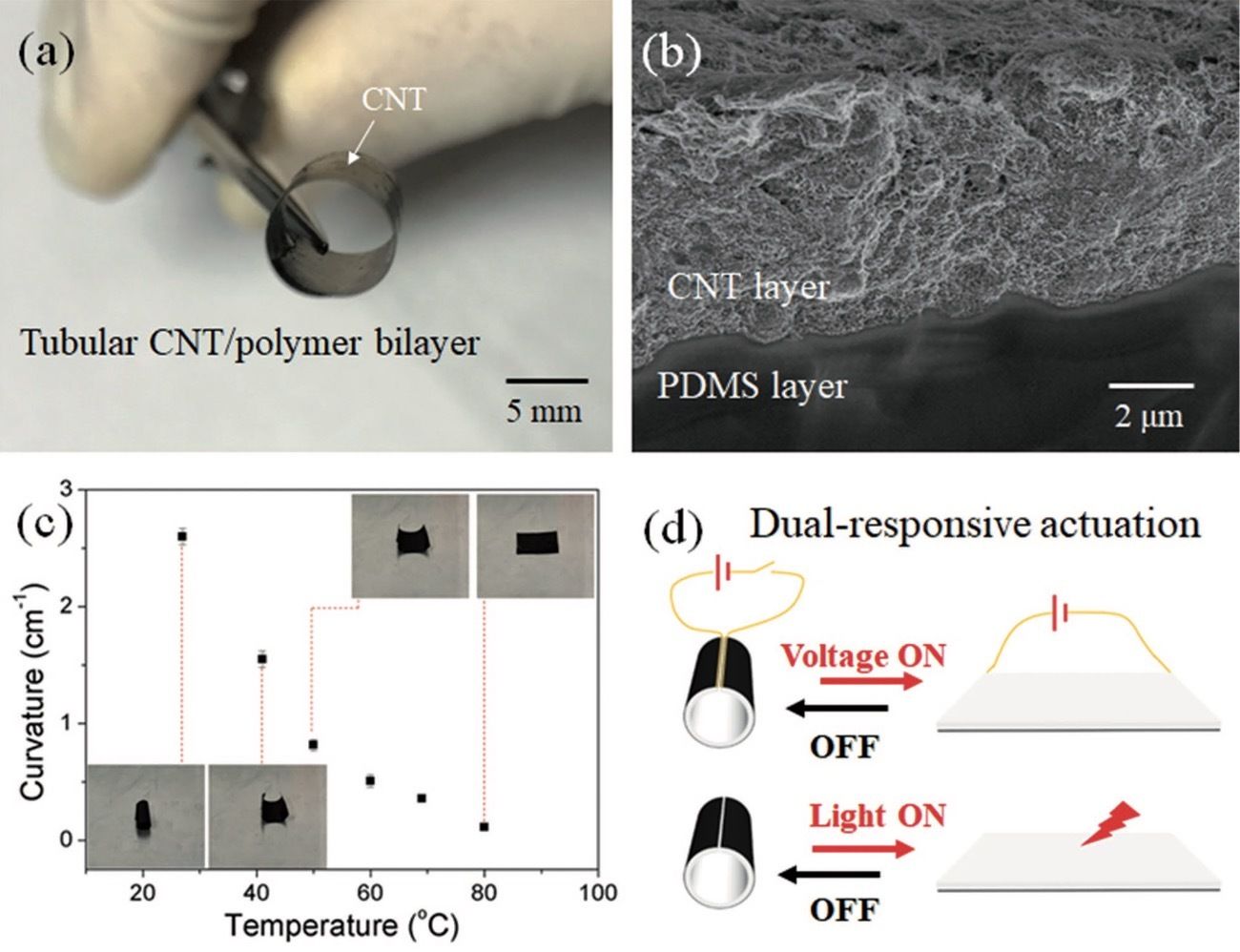
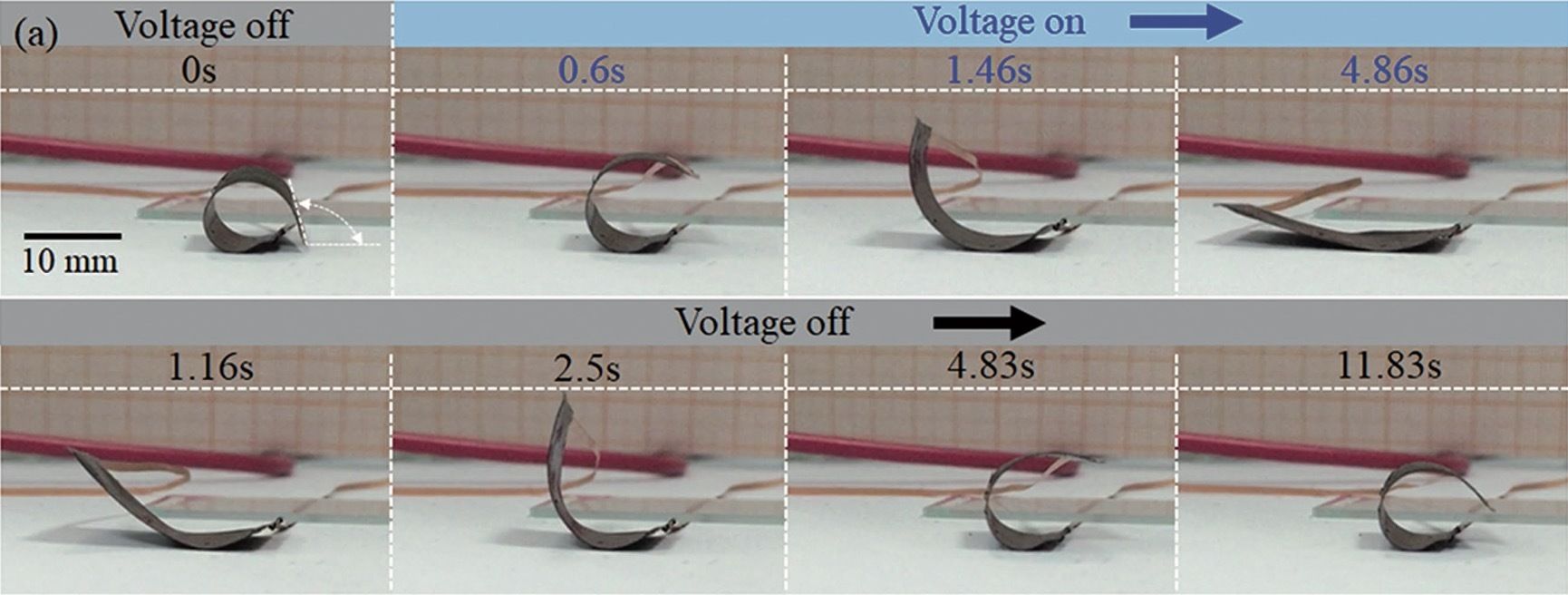
这是一种具有卷曲形状的碳纳米管聚合物双层薄膜驱动器,可在低电压以及光照射下从「管状」快速大变形到「平直」形状,当外部刺激撤除后还能恢复其原始形状。
科研人员模拟人类的「弹指」动作,将该驱动器的两端部分重合,就构筑出了所谓的「光驱动跳跃机器人」。在光照条件下,这种机器人的弹性势能积累并瞬间释放,可产生高度达自身高度 5 倍以上的跳跃运动,并在空中做出翻滚动作。
基于这项研究成果,该团队进一步研发了光驱动及电驱动爬行机器人、抓取物体的仿生机械手,以及能在太阳光照射下绽开的「仿生花朵」等系列智能器件。
柔性材料在智能仿生、柔性传感等领域具有广泛应用前景,更多此类发明和研究进展值得期待。可以畅想一下,各种柔性材料制作的器件出现在你生活中时,会是一种什么样的体验。
图片来源:视觉中国、Advanced Functional Materials、网络
责任编辑:早优夫斯基


